触覚認識モジュール
触覚認識モジュール
投稿日時:
火, 2012-01-31 18:21
概要
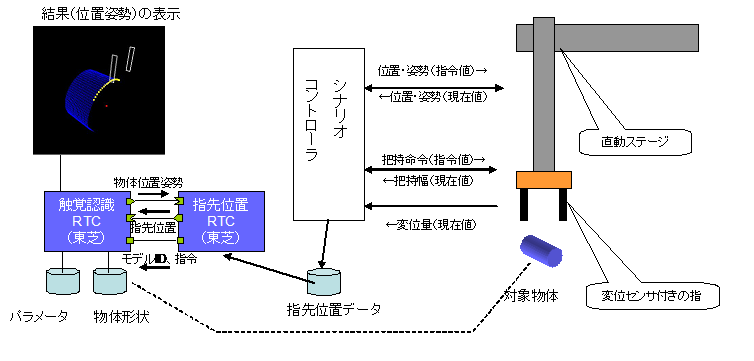
触覚認識モジュールは、変位センサを装備したロボットハンドで
物体(スプーン、缶など)の部分的な形状を測定し、予め登録した
形状データと照合し、その物体の重心位置・姿勢を算出するもの
である。
ライセンス
バイナリー提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
株式会社 東芝
研究開発センター 機械・システムラボラトリー
〒212-8582 川崎市幸区小向東芝町1
Tel :044-549-2193
Email:atsushi.sugahara@toshiba.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1.0 | 1.0.0 | WindowsXP | C++ | TactileRecognition2.zip | TactileRecogDoc.zip | 2011.12.01 |
問合先(メールアドレス):
atsushi.sugahara@toshiba.co.jp
最終更新日時:
月, 2012-02-20 10:18
コメント
OK