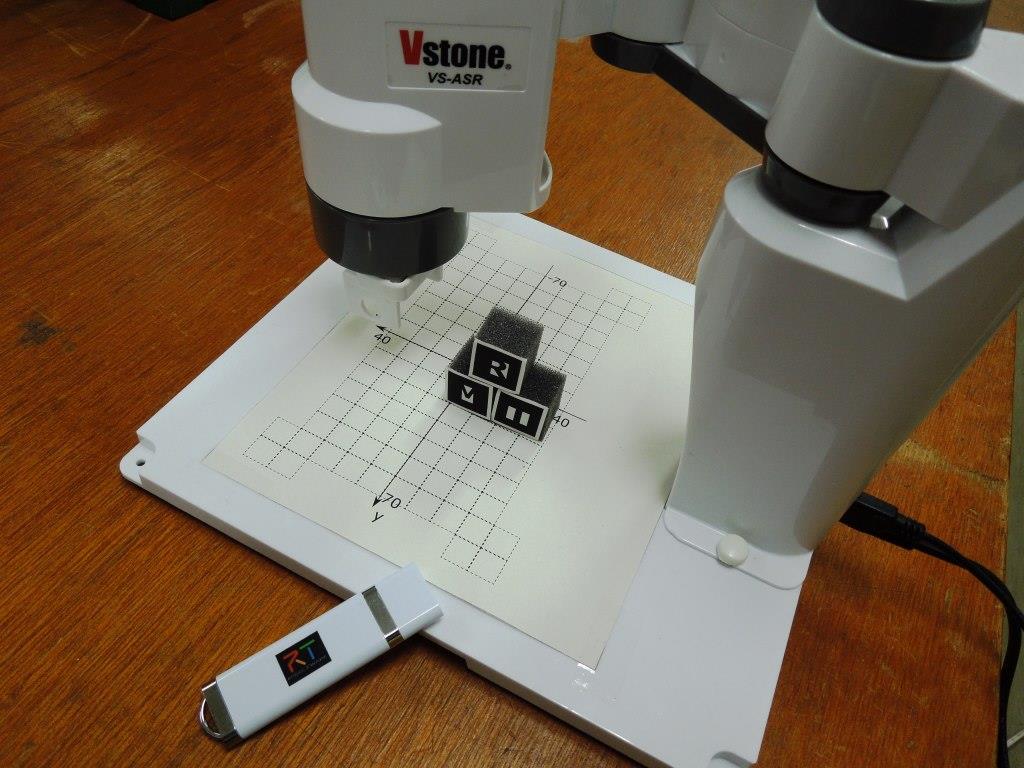
ヴイストン株式会社製アカデミックスカラロボットを手軽に制御できるツールを開発しました.
ダウンロードして,すぐに始められます.まずは,お試しください.
ロボット教育ツールの使い方は,こちら(GitHub)から参照できます.
USBメモリへの実装後については,説明動画を用意してあります.こちら(YouTube)から視聴することができます.
ロボット教育ツールを含むOpenRTM Tutorialのパッケージは,こちら(GitHub)からダウンロードできます.
ヴイストン株式会社製アカデミックスカラロボット,および三菱電機株式会社製MELFA RV-3SDにおいて,ハードウエアRTCの交換で同一のパレタイジングデモを実現しました.
OpenRTM TutorialにARToolKitを利用したパレタイジングデモを実装しました(ただし,アカデミックスカラロボットについてのみ,チュートリアルの言語は日本語のみ).
ARToolKitを利用したパレタイジングデモを含むOpenRTM Tutorialのパッケージは,こちら(GitHub)からダウンロードできます.
2015年12月2日~5日に東京ビックサイトで開催された国際ロボット展(iREX2015)のNEDOブースに出展しました.
当日の資料は,以下よりダウンロードできます.
あらかじめ用意されたXML台本の進行にしたがって,ロボットを同期して制御するコンポーネント群です.音声合成による発話やロボットの動きを同期して制御します.複数台のロボットを使用すれば,ロボット同士の対話を実現することも可能です.
ビュートローバーRTCは、OpenRTM-aistを用いたRTコンポーネント開発を学習するための開発キットです。ロボット本体は、USB接続で制御するH8マイコンボードを搭載した台車型ロボット、及びミニノートPCで構成されています。
RGB-Dセンサを利用した,ユーザの指差し位置を認識するためのコンポーネントです. 簡便な準備で使用できるようにすることを目標に作成しています. 迅速にキャリブレーションを行い,システムに組み込むことができるようになります.
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク



RTミドルウエアの産業応用を目的としたエンジニアリングサンプル
発表
概要