作業知能モジュール群
2次元オプティカルフロー・3次元ステレオ切り替え動作コンポーネント
概要
本コンポーネントは、2次元のオプティカルフローと3次元のステレオ距離計測を外部入力によって切り替えることの可能な画像処理コンポーネントです。
入力はTimedShort型のデータポートで、出力はTImedFloatSeq型のデータポートになります。
注意事項
本コンポーネントの動作環境は、以下のとおりです。
●画像認識ボード用組込Linux(富士通研究所様ご提供)
●OpenRTM-aist1.0対応画像認識ボード用RTM(セック様ご提供)
ライセンス
修正BSDライセンスに基づき配布されます。 詳しくは、LICENSE.txtファイルをご覧ください。
連絡先
東京大学 知能機械情報学専攻 情報システム工学研究室itngr@jsk.t.u-tokyo.ac.jp
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1.3 | 1.0.0 | その他 | C++ | OpticalAndStereo.tar.gz | pukiwiki.txt | 2011.06.30 |
オーダーコンポーネント
概要
webブラウザを使って注文を受け付けるコンポーネントです.
データサーバのサンプルも含みます.
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
3月上旬頃公開予定
連絡先
奈良先端科学技術大学院大学 情報科学研究科
robotics-staff@is.naist.jp
〒630-0192 奈良県 生駒市 高山町 8916-5
Tel: 0743-72-5371, Fax: 0743-72-5379
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
双腕協調搬送作業
概要
工場での部品搬送をイメージしたサービス。
片手では搬送できないような重量物を両手で協調しながら搬送する。
関連モジュール
ライセンス
EPLライセンスを適用しています。
開発バージョン
ただいま、準備中。しばらくお待ちください。
連絡先
東北大学大学院工学研究科
〒980-8579 仙台市青葉区荒巻字青葉6-6-01
近野 敦
email:konno@space.mech.tohoku.ac.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
触覚認識モジュール
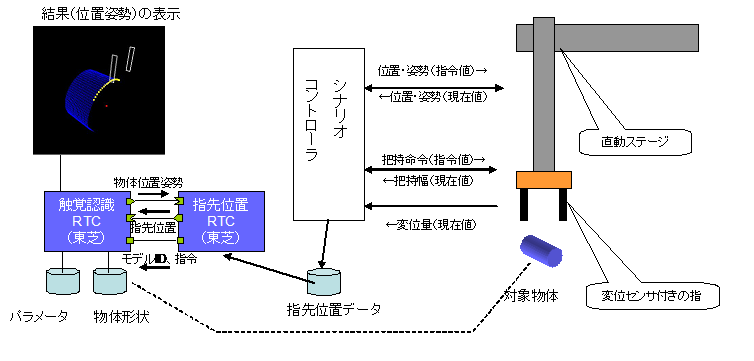
概要
触覚認識モジュールは、変位センサを装備したロボットハンドで
物体(スプーン、缶など)の部分的な形状を測定し、予め登録した
形状データと照合し、その物体の重心位置・姿勢を算出するもの
である。
ライセンス
バイナリー提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
株式会社 東芝
研究開発センター 機械・システムラボラトリー
〒212-8582 川崎市幸区小向東芝町1
Tel :044-549-2193
Email:atsushi.sugahara@toshiba.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1.0 | 1.0.0 | WindowsXP | C++ | TactileRecognition2.zip | TactileRecogDoc.zip | 2011.12.01 |
ステレオ画像取得RTC
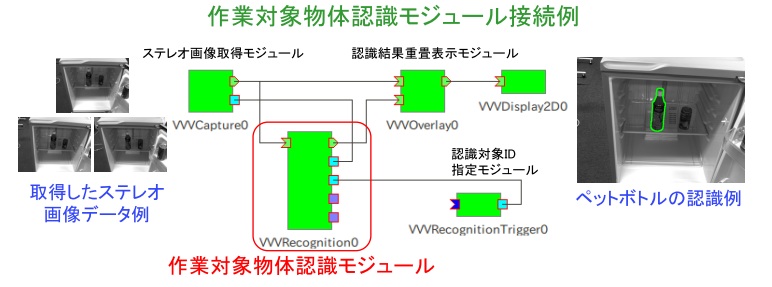
概要
計算機に接続された複数のカメラを用いて、産総研VVV形式に基づく
ステレオ画像データを作成し出力するモジュールです。
関連モジュール
作業対象物認識モジュール群
認識結果の重畳表示RTC
画像データの表示RTC
注意事項
利用に際しては高機能3次元視覚システムVVVのキャリブレーションデータが必要になります。
詳細に関しましては下記へお問い合わせ下さい。
ライセンス
実行ファイルを有償でご提供させて頂きます。
詳しくは、下記へご相談ください。
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 タスクビジョン研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
email:irtsp-vvv@m.aist.go.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver. | RTM | OS | 言語 | ドキュメント | Date |
| 0.9 | 1.0.0 | Ubuntu | C++ | VVVRecognition.zip | 2010.02.15 |
教示支援・座標位置補正コントロール
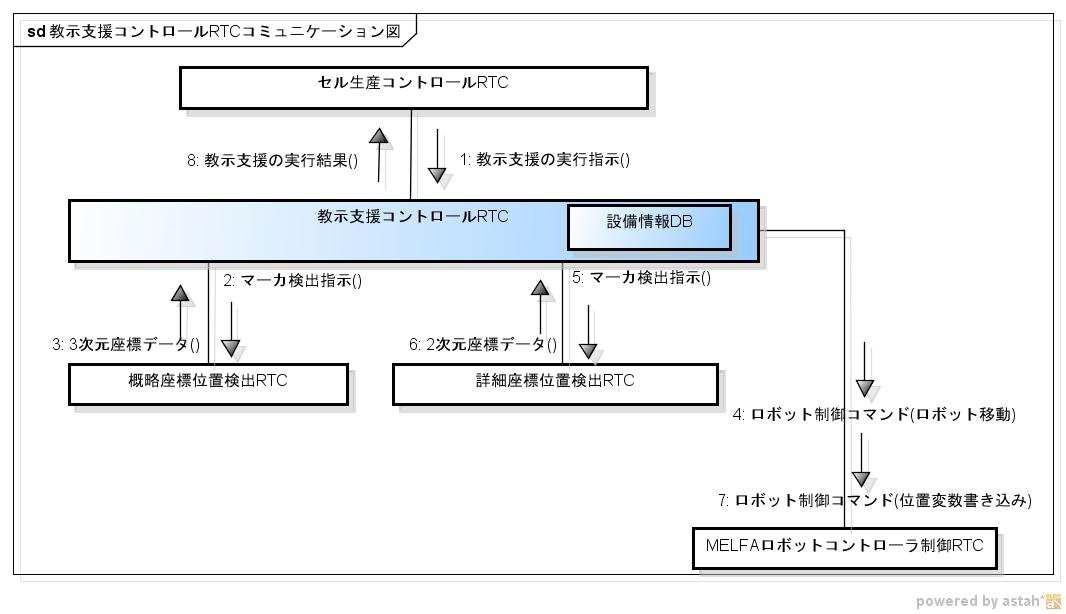
概要
このコンポーネントは、データポートより、部品トレイ上のマーカ座標を読み込んで、そのマーカ座標と設備情報から、各部品の座標を算出して、その座標をロボットコントローラのロボット位置変数へ書き込む機能を有する。
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/
全身像認識モジュール
概要
本モジュールセットは、入力された画像と全身像の位置から全身画像を抽出し、予め登録された人物のうち誰であるかを出力するコンポーネントです。
BodyLearningモジュールとBodyRecognitionモジュールにより構成されます。
・BodyLearningモジュールは、全身画像を学習し辞書を生成します。
・BodyRecognitionモジュールは、BodyLearningで作成された辞書を
用いて個人認識を行います。
認識にはKOMSM(Kernel Orthogonal Mutual Subspace Method)を利用しています。
注意事項
下記ライブラリを使用しています。
●OpenCV 2.1.0
ライセンス
商用以外の利用の場合、BSDライセンスを適用します。
商用利用の際には、個別に使用条件を検討させて頂きます。
詳しくは、ご連絡をお願い致します。
連絡先
筑波大学大学院 システム情報工学研究科
kfukui@cs.tsukuba.ac.jp, matsumoto@cvlab.cs.tsukuba.ac.jp
〒305-8573つくば市天王台1-1-1
Download
| Ver | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 2.0 | 1.0.0 | Ubuntu | C++ | BodyRecog_BodyLearning_2.0.zip | BodyRecog_BodyLearning_Doc2.0.zip | 2012.02.14 |
タウンマネジメントシステムRTC
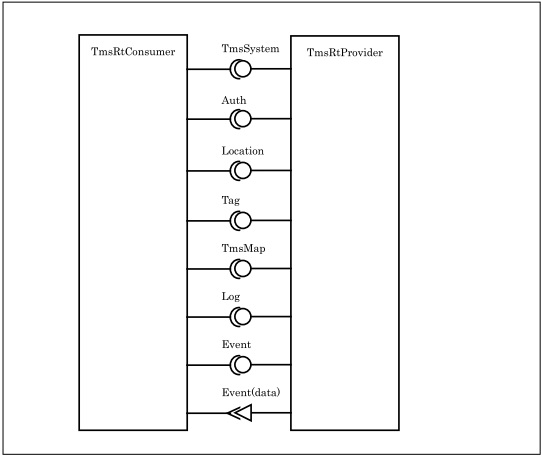
概要
環境情報の収集・管理・提供を行う情報管理機構であるタウンマネジメントシステムを、RTMプラットフォーム上で利用するためのコンポーネントです。
注意事項
●利用にはタウンマネジメントシステムが必要です。コンポーネントに同梱しております。
ライセンス
EPLライセンスを適用します。 連絡先
九州大学大学院システム情報科学研究院情報知能工学部門 長谷川研究室 tsuji@ait.kyushu-u.ac.jp
〒819-0395 福岡県福岡市西区元岡744 ウエスト2 号館912 室
Tel :092-802-3598 Fax:092-802-3607
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 0.4.0 | 1.0.0 | WindowsXP | JAVA | TMS2011_bin.zip | TMS_RTC_manual.zip | 2012.01.12 |
HiroNXInterface
概要
双腕ロボットHiroNXに対してOpenRTM経由で動作コマンドを送るためのインタフェースを提供します。
ドキュメント
ライセンス
LGPL ver.2.1
開発バージョン
http://code.google.com/p/hironx-interface
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 タスクビジョン研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
email: nedo-vms-contact@m.aist.go.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
来訪者受付システム
概要
来訪者の入館・退館における受付業務を主としたオフィスサービスを行うもの
とする。
このシステムで行われるサービス内容は、表.サービス一覧に示すサービスに
分割されており各サービス毎及び、サービス連動での動作を可能とする。
【サービス 一覧】
Download
Ver 1.0
Ver 0.5
ライセンス
各モジュールのライセンス条項に帰属します。
連絡先
富士ソフト株式会社 ロボット事業グループ 商品開発ユニット
E-Mail :tnninomi@fsi.co.jp
注意事項・免責事項
本サイトのコンテンツをご利用される場合には、以下の記載事項・条件にご同意いただいたものとします。
・利用者がコンテンツを利用することにより生じたいかなる損害についても一切責任を負いません。
コンテンツの変更、削除等は、原則として利用者への予告なしに行います。
また、止むを得ない事由により、 コンテンツの公開を中断あるいは中止させていただくことがあります。
・コンテンツの情報の変更、削除、公開の中断、中止により、利用者に生じたいかなる損害についても一切責任を 負いません。
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)「次世代ロボット知能化技術開発プロジェクト」の一環として
開発されたことを記し、ここに感謝の意を表する。
NEDO-RTCs