作業知能モジュール群
ハイブリッド視覚補正(3D)
概要
ロボットの教示作業をカメラ画像を見ながら対話的に行う用途を想定し
画面上で指示されたポイント、領域に対応する3次元距離データを利用して
各種データ出力を行います。
入力されたビットマップ画像、3次元距離データを利用して、下記の処理を行い
その結果画像(ビットマップ)、および結果データを出力するモジュールです。
・法線方向算出
・水平方向目標位置算出
・深さ算出
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
三菱電機株式会社
先端技術総合研究所 業務部 技術情報課
http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html
お問い合わせ窓口)
ATC_webmaster@ra.MitsubishiElectric.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
ARTool Kitマーカ検出・位置姿勢推定モジュール
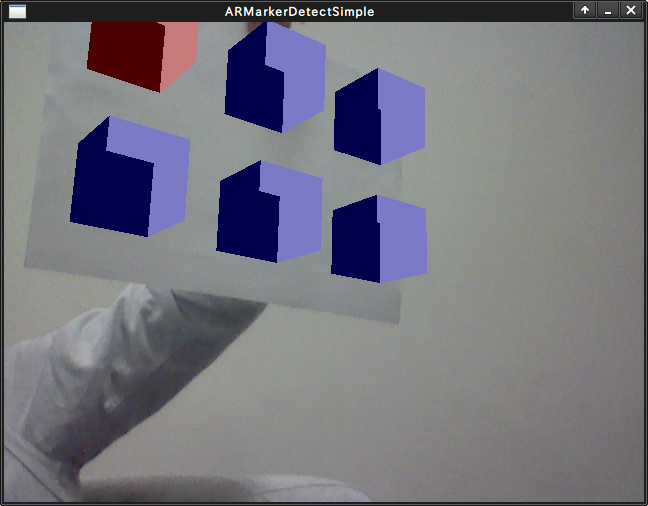
概要
ARTool Kitを利用し、マーカの検出・位置姿勢推定を行うRTC。
注意事項
下記ライブラリを使用しています。
●ARTool Kit 2.72.1, OpenGL, GLUT, GLEW, OpenCV 2.0.0
ライセンス
ARTool Kitマーカ検出・位置姿勢推定モジュール
本モジュールのライセンスは、ARTool Kit のライセンス(GPL)に従います。
本モジュールの改変・再配布等については、GPL に従って行ってください。
画像キャプチャコンポーネント
商用以外の利用の場合、BSDライセンスが適用されます。
商用利用の際には、個別に使用条件を検討させて頂きます。
詳しくは、ご連絡をお願い致します。
連絡先
奈良先端科学技術大学院大学 情報科学研究科
robotics-staff@is.naist.jp
〒630-0192 奈良県 生駒市 高山町 8916-5
Tel: 0743-72-5376, Fax: 0743-72-5379
Download
| Ver. | OS | RTM | 言語 | モジュール本体 | ドキュメント | Date |
| 1.0 | Ubuntu | 1.0.0 | C++ | ARMarkerDetect_1.0.zip | ARMarkerDetect_1.0_doc.zip | 2011.07.05 |
作業対象物認識モジュール群
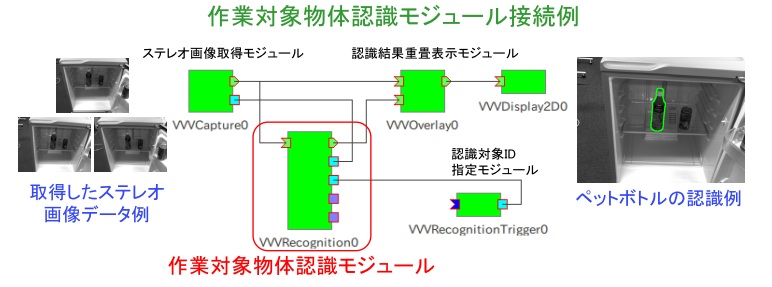
概要
産業技術総合研究所が開発している3次元物体の認識機能を応用し
指定された対象物体の位置・姿勢を共通形式で出力するモジュール群です。
関連モジュール
ステレオ画像取得RTC
認識結果の重畳表示RTC
画像データの表示RTC
注意事項
利用に際しては高機能3次元視覚システムVVVのキャリブレーションデータが必要になります。
詳細に関しましては下記へお問い合わせ下さい。
ライセンス
実行ファイルを有償でご提供させて頂きます。
詳しくは、下記へご相談ください。
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 タスクビジョン研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
email:irtsp-vvv@m.aist.go.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver. | RTM | OS | 言語 | ドキュメント | Date |
| 0.9 | 1.0.0 | Ubuntu | C++ | VVVRecognition.zip | 2010.12.15 |
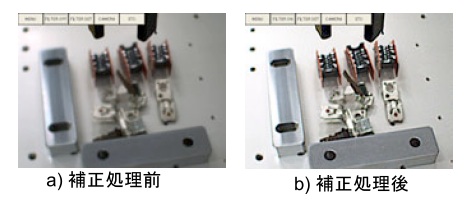
詳細座標位置検出RTC
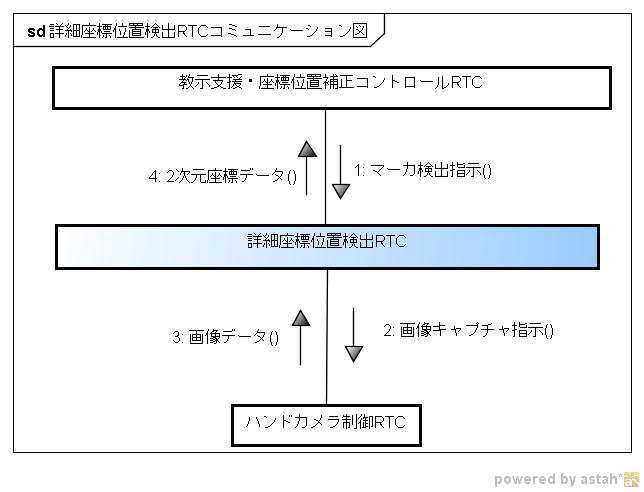
概要
このコンポーネントは、画像ファイルを読み込んで、画像データ上の教示用の補助マーク1点を検出して、ロボット座標系におけるマーカの2次元座標で算出する。
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/
ステレオカメラキャリブレーションコンポーネント
概要
本コンポーネントは,CameraImage型でステレオカメラの両眼画像を取得し,内部パラメータ,外部パラメータを推定するためのコンポーネントです。
注意事項
以下のパッケージの追加インストールが必要になります。●opencv2.2
●RTMEXTenderが必要です。詳細は
http://www.jsk.t.u-tokyo.ac.jp/~h-yaguchi/rtmext/
を参照してください。
ライセンス
修正BSDライセンスに基づき配布されます。詳しくは、LICENSE.txtファイルをご覧ください。
連絡先
東京大学 知能機械情報学専攻 情報システム工学研究室itngr@jsk.t.u-tokyo.ac.jp
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| Rev.1 | 1.0.0 | Ubuntu | C++ | StereoCameraCalibration.tar.gz | README.txt | 2011.11.24 |
USBカメラコンポーネント(共通)
概要
共通カメラIFに準拠したカメラ画像取得コンポーネントです.
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
リンク先参照
連絡先
奈良先端科学技術大学院大学 情報科学研究科
robotics-staff@is.naist.jp
〒630-0192 奈良県 生駒市 高山町 8916-5
Tel: 0743-72-5371, Fax: 0743-72-5379
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
双腕協調制御RTC
概要
右手先位置・姿勢6自由度,左手先位置・姿勢6自由度の
合計12自由度を操作することで対象物の位置・姿勢の6自由度,
または対象物に与える外力・外モーメントの6自由度,
右手と左手の相対位置・姿勢偏差の6自由度,または対象物に
与える内力・内モーメントの6自由度の合計12自由度を制御可能。
どれを制御するかは選択行列Sで決定。
ライセンス
EPLライセンスを適用しています。
開発バージョン
ただいま、準備中。しばらくお待ちください。
連絡先
東北大学大学院工学研究科
〒980-8579 仙台市青葉区荒巻字青葉6-6-01
近野 敦
email:konno@space.mech.tohoku.ac.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
単眼位置姿勢計測・表示モジュール
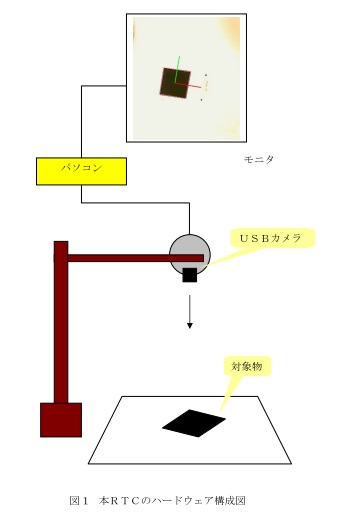
概要
単眼のUSBカメラを使って、多角形マーカの画像を撮影し
その位置・姿勢を計測し表示するモジュールである。
マーカとして、四角形、六角形、凸形、凹形を用意した。
位置・姿勢出力は、センス系統一IFに準拠したものであり
ロボットアームをコントロールする相対位置決めモジュールと連結できる。
表示には、マーカの実写画像に姿勢ベクトルのCG画を重畳させたり
ロボットの手先方向を表示させたりする機能を設けた。
ライセンス
バイナリーを無償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
株式会社 東芝
研究開発センター 機械・システムラボラトリー
〒212-8582 川崎市幸区小向東芝町1
Tel :044-549-2193
Email:atsushi.sugahara@toshiba.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1.0 | 1.0.0 | WindowsXP | C++ | MarkerRecogRTC.zip | MarkerRecogDoc.zip | 2011.04.11 |
MELFA外部制御モジュール
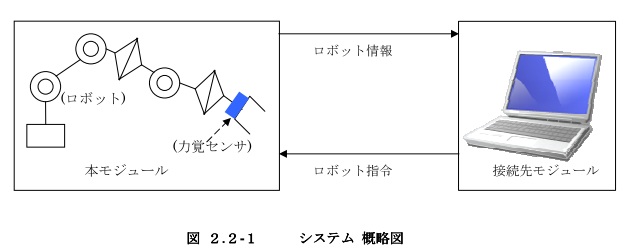
概要
三菱電機産業用ロボット(MELFA)とニッタ製力覚センサの協調動作を
制御するためのRTC入出力ポートを提供する。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
三菱電機株式会社
先端技術総合研究所 業務部 技術情報課
http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html
お問い合わせ窓口)
ATC_webmaster@ra.MitsubishiElectric.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
3次元フロー生成コンポーネント
概要
本コンポーネントは、株式会社富士通研究所製画像処理認識ハードウェアモジュールNXV1-1394-PCBにて画像をキャプチャして、3次元フローを出力するコンポーネントです。
注意事項
本コンポーネントの動作環境は、以下のとおりです。
●画像認識ボード用組込Linux(富士通研究所様ご提供)
●OpenRTM-aist-1.0.0(C++版)の富士通画像認識モジュール用クロスコンパイル)
(株式会社セック様より詳しい情報はご案内予定)
ライセンス
修正BSDライセンスに基づき配布されます。詳しくは、LICENSE.txtファイルをご覧ください。
連絡先
東京大学 知能機械情報学専攻 情報システム工学研究室itngr@jsk.t.u-tokyo.ac.jp
Download