作業知能モジュール群
手先拘束下でのマニピュレーション知能モジュール
概要
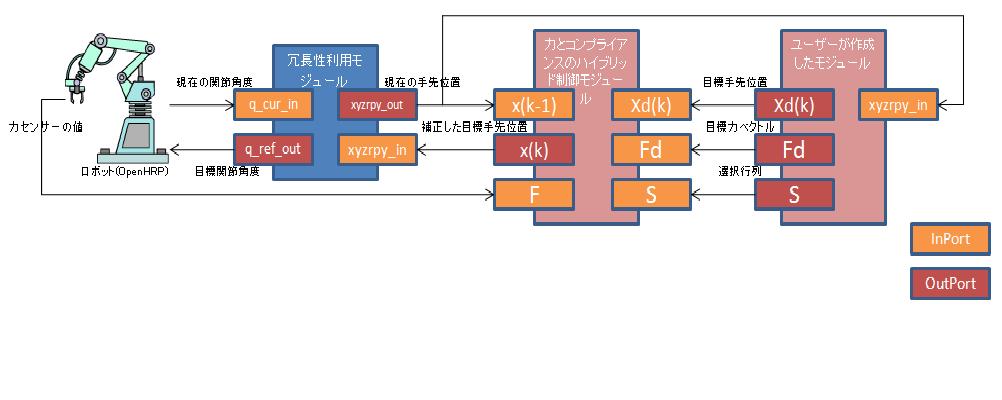
本モジュールは、ロボットのモデル、作業対象物のモデルから運動学を解き、
現在受けている外力から拘束面を推定し、拘束力を一定にしつつ指定された
目標位置にもっとも近くなる目標角度偏差を出力するモジュールです。
注意事項
下記ツールを使用しています。●OpenHRP3 Ver.3.1.0
●Ruby 1.8.7 http://ruby-lang.org/ja/
●log4cxx http://logging.apache.org/log4cxx/
ライセンス
EPLライセンスを適用いたします。連絡先
東北大学大学院工学研究科 機械システムデザイン工学専攻konno@space.mech.tohoku.ac.jp
〒980-8579 仙台市青葉区荒巻字青葉6-6-01
Tel: 022-795-6972, Fax: 022-795-6971
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 3 | 1.0.0 | Ubuntu | C++ | force_pos_hybrid_module-20110329.zip | document-force_pos_hybrid_module.pdf | 2011.04.08 |
お菓子ハンドリングシステム
概要
対象物のテクスチャ等の特徴量を基に 物体認識を行い,認識結果に基づいてお菓子などの日用品の多品種個別識別とそのハンドリングを実現するコンポーネント群です.
和菓子の店頭販売をイメージし,ユーザの発見,ユーザとインタラクション,和菓子の認識,和菓子のハンドリングを行うためのコンポーネントとサンプルを提供します.
モジュール構成
カメラベース人物発見モジュール群
人発見コンポーネント
LRFベース人物発見モジュール群
データ取得コンポーネント(LRF)
人発見コンポーネント(サイズ検出)
ブラウザベースUIモジュール群
データベースサンプル(MySQL)
Webサイトサンプル(HTML)
オーダーコンポーネント
音声認識ベースUIモジュール群
OpenHRIコンポーネント群
対話シナリオサンプル
テンプレートマッチングベース対象物認識モジュール群
USBカメラコンポーネント(共通)
ビューワコンポーネント
テンプレートマッチングコンポーネント
SIFTベース対象物認識モジュール群
SIFTコンポーネント
モデル登録・管理ツール
認識情報管理コンポーネント
バーコード認識モジュール群
1次元バーコード認識コンポーネント
ARマーカー認識コンポーネント(ARToolKitPlus)
背景差分ベース対象物認識モジュール群
背景差分コンポーネント
Pythonベースシナリオ
シナリオサンプル
マニピュレータの双腕化による作業モジュール群
高レベル(タスクレベル)アーム
双腕干渉回避管理
Hiroハンド
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
3月上旬頃公開予定
連絡先
奈良先端科学技術大学院大学 情報科学研究科
robotics-staff@is.naist.jp
〒630-0192 奈良県 生駒市 高山町 8916-5
Tel: 0743-72-5371, Fax: 0743-72-5379
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
1次元バーコード認識コンポーネント
概要
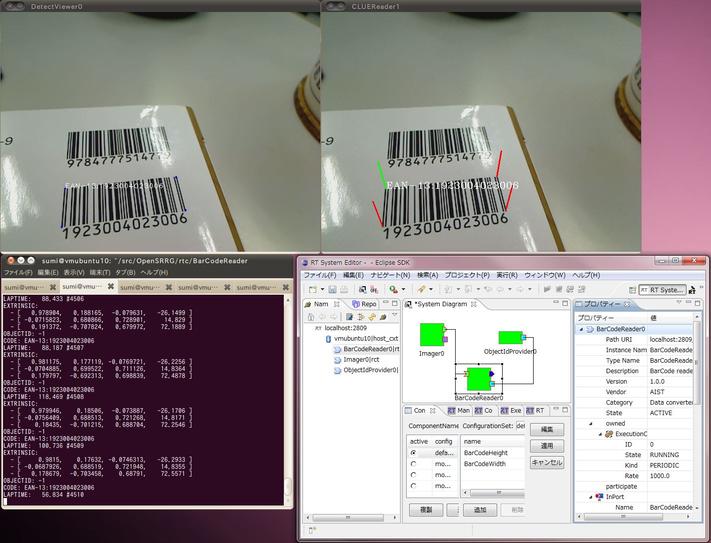
各種一次元バーコードを読み取り、そのIDと位置姿勢(6DOF)を返します。入力ポートのデータ型はImg::TimedCameraImage
出力ポートのデータ型は要素数20のRTC::TimedDoubleSeqです。
注意事項
下記ソフトウェアを使用しています。
●ZBar-0.10
●ARToolKitPlus-2.1.5
●OpenCV-2.0
ライセンス
OpenRTM-aist-1.0 のライセンスに準じます。連絡先
独立行政法人 産業技術総合研究所知能システム研究部門 サービスロボティクス研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
Tel/Fax:029-861-3427/029-862-3493
email: srrg@m.aist.go.jp
Download
| Ver. | OS | RTM | 言語 | モジュール本体 | ドキュメント | Date |
| 0.2.1.3 | Ubuntu | 1.0.0 | C++ | BarCodeReader-0.2.1.3.zip | BarCodeReaderDoc.zip | 2012.01.19 |
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
複合情報GUIモジュール
概要
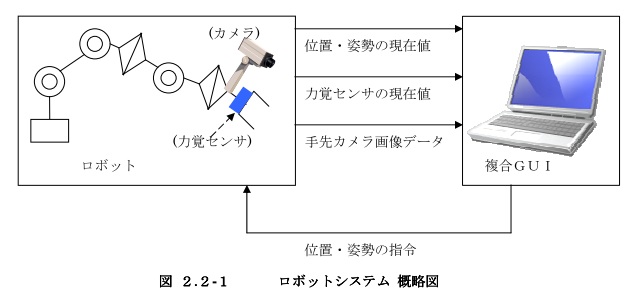
MultiGUI_RTCは複合情報GUIモジュールです。
ロボットの動作状態の適切な可視化によって,教示作業,特に設備や組立部品の
現物に合わせて追加・修正する作業パスの精密化作業の効率化を図ります。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
三菱電機株式会社
先端技術総合研究所 業務部 技術情報課
http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html
お問い合わせ窓口)
ATC_webmaster@ra.MitsubishiElectric.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
ロボットアーム(PA10)制御モジュール

概要
三菱重工業製汎用ロボットPA10の関節角速度制御を行うRTCです。本知能モジュールは、
ロボットアーム分解運動速度制御モジュール(ACT共通I/F対応版)
と組み合わせて使用します。
注意事項
下記ライブラリを使用しています。●依存ライブラリ:三菱重工業製PAライブラリ(商用)
ライセンス
商用以外の利用の場合、BSDライセンスが適用されます。商用利用の際には、個別に使用条件を検討させて頂きます。
詳しくは、ご連絡をお願い致します。
連絡先
富士ソフト株式会社 ロボット事業グループ 商品開発ユニットE-Mail :tnninomi@fsi.co.jp
Download
| Ver. | OS | RTM | 言語 | モジュール本体 | ドキュメント | Date |
| 1.0 | WindowsXP | 1.0.0 | C++ | PA10_1.0.zip | PA10_1.0_doc.zip | 2011.07.05 |
音声合成モジュール
概要
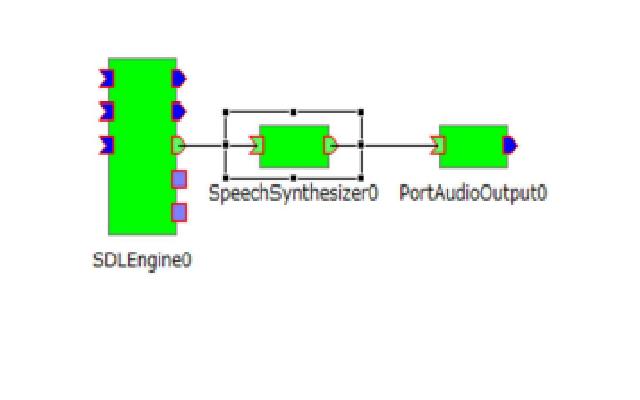
テキストから音声合成を行い出力するモジュールです。音声合成のエンジンには、AquesTalk を使用しています。
入力された発話用文字列を音声合成エンジンであるAquesTalkに
渡して音声サウンドデータを合成し、OpenHRIのPortAudioOutput
モジュール等を利用して出力しています。
ライセンス
EPLライセンスを適用します。 連絡先
九州工業大学情報工学研究院生命情報工学研究系ohashi@bio.kyutech.ac.jp
TEL/FAX 0948-29-7821/7801
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 2.0 | 1.0.0 | WindowsXP | C++ | SpeechSynthesizer.2.0.zip | SpeechSynthesizerDoc.zip | 2012.01.24 |
三菱重工製PA10ロボットコントローラ制御
概要
このコンポーネントは、三菱重工製PA10向けのロボットコントローラ制御用RTCです。ACT共通インタフェース対応版です。 ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/
MCM4302向けカメラ制御RTC

概要
このコンポーネントは、マイクロビジョン社製USBカメラ(MCM-4302)1台を制御する機能を有する。
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/
高レベル(タスクレベル)アーム
概要
タスクレベルコマンド(菓子Aをトレイの真中へ,等)を
中レベルコマンド(A1点へ移動,ハンドを閉じる,等)へ
書き下して中レベルコンポーネントへ送る
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
3月上旬頃公開予定
連絡先
筑波大学 大学院システム情報工学研究科
aiyama@esys.tsukuba.ac.jp
〒305-8573 茨城県つくば市天王台1-1-1
Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
日用品把持用アーム制御RTC(JACOアーム制御モジュール)
概要
Kinova社のロボットアームJACOを制御するためのインターフェース。
注意事項
・Windowsの.NETフレームワーク4以上でのみ動作します。
・上記のミドルウェア環境のみで動作します。
・本モジュールの使用にはJACOの制御ライブラリ(ライセンス付)が別途必要です。
ライセンス
修正BSDライセンスを適用しています。
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 サービスロボティクス研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
Tel/Fax:029-861-3427/029-862-3493
email: srrg@m.aist.go.jp
Download
DownloadURL
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。