作業知能モジュール群
手の位置検出RTC
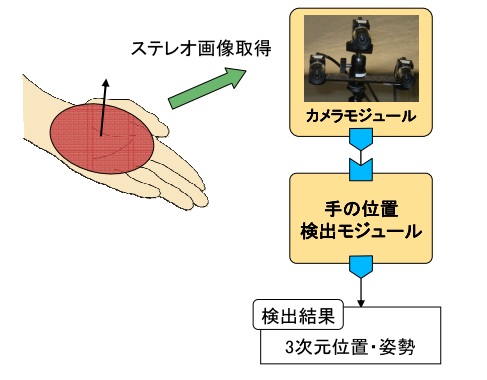
概要
入力されたステレオ画像を処理し、手のひらのような物体を置ける面の
3次元位置と傾きを出力するモジュールです。
ライセンス
実行ファイルを有償でご提供させて頂きます。
詳しくは、下記へご相談ください。
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 タスクビジョン研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
email:irtsp-vvv@m.aist.go.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver. | RTM | OS | 言語 | ドキュメント | Date |
| 0.9 | 1.0.0 | Ubuntu | C++ | VVVDetectHand.zip | 2011.08.12 |
チョコ停事前回避コントロールRTC
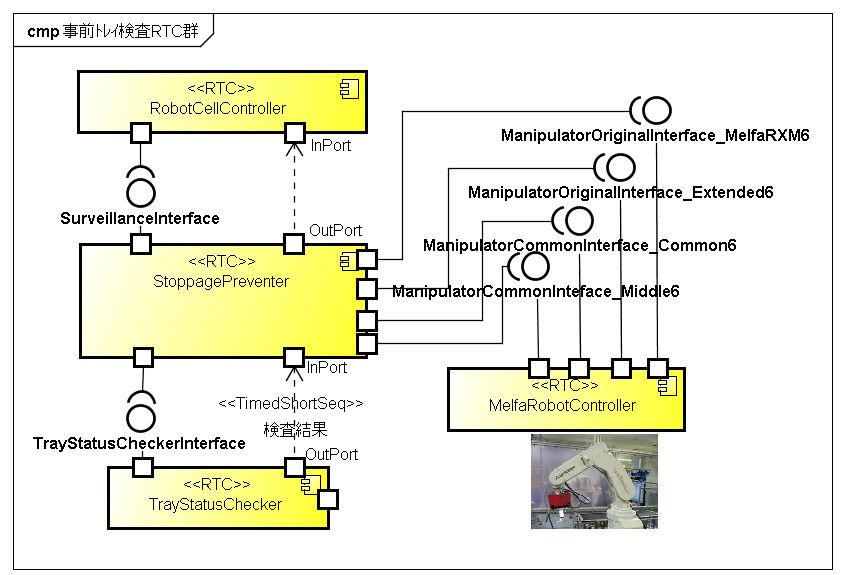
概要
本RTコンポーネントは、ロボット制御セル生産システムにおいて、システム
状態を監視し、指定のタイミングで、事前トレイ検査等のチョコ停回避制御を
起動する。
注意事項
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/
全身運動制御知能モジュール群(リファレンスハード1号機)

概要
実機およびシミュレーションの全身運動制御知能モジュール群です。RH1アームのコントローラモジュール、軌道供給モジュール、時間軌道生成
モジュール、データ定義IDL、ロボットモデルが含まれます。
ライセンス
OpenRTMのライセンスに準じます。連絡先
独立行政法人 産業技術総合研究所
e.yoshida@aist.go.jp
〒305-8568 茨城県つくば市梅園1-1-1
つくば中央第2 知能システム研究部門AIST-CNRS ロボット工学連携研究体
Download
| Ver. | OS | RTM | 言語 | モジュール本体 | ドキュメント | Date |
| 1.1 | Ubuntu | 0.4.x | C++ | Controller.zip | 100622-RH1-arm-controller.pdf | 2010.06.23 |
SIFTコンポーネント
概要
共通カメラIFに準拠したSIFTを用いた物体位置姿勢推定コンポーネントです.
ライセンス
修正BSDライセンスを適用しています.
SIFTアルゴリズムは特許が存在するため,利用について詳しくは下記をご参照下さい.
http://www.cs.ubc.ca/~lowe/keypoints/
開発バージョン
リンク先参照
連絡先
国立大学法人 大阪大学 大学院基礎工学研究科
k-oohara@arai-lab.sys.es.osaka-u.ac.jp
〒560-8531 大阪府豊中市待兼山町1-3
Tel: 06-6850-6368, Fax: 06-6850-6341
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
相対位置決め制御モジュール
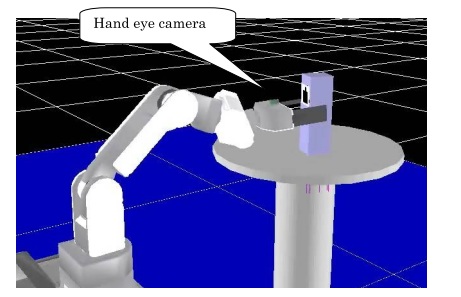
概要
本モジュールは、ハンド・アイ・カメラを搭載したロボットアームに
ビジュアルフィードバック動作を行わせるために開発したものである。
ハンド・アイ・カメラで撮影したマーカの画像を基に、マーカの
位置姿勢を算出するRTC「単眼位置姿勢計測・表示モジュール 」がある。
本モジュールは、このモジュールと接続することにより、マーカの位置
姿勢情報を受け、マーカに近づくためのアーム関節角(速度)を算出する
ものである。
ライセンス
詳しい内容については、下記へご連絡願います。
連絡先
株式会社 東芝
研究開発センター 機械・システムラボラトリー
〒212-8582 川崎市幸区小向東芝町1
Tel :044-549-2193
Email:atsushi.sugahara@toshiba.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1.0 | 1.0.0 | Ubuntu | C++ | RelativePositionControl2.zip | RelativePositionControl_Doc2.zip | 2011.12.01 |
作業エラー処理モジュール
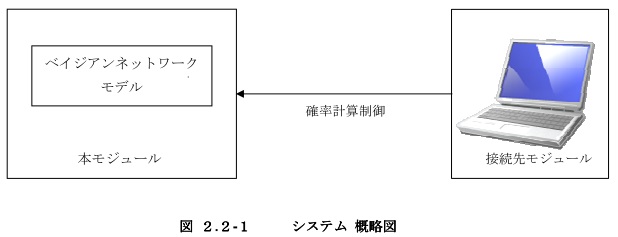
概要
作業エラーの発生傾向分析のために、ベイジアンネットワークを
利用した確率計算機能を提供する。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
三菱電機株式会社
先端技術総合研究所 業務部 技術情報課
http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html
お問い合わせ窓口)
ATC_webmaster@ra.MitsubishiElectric.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Flea2向けカメラ制御RTC
概要
このコンポーネントは、Point Grey Research社製 IEEE-1394bカメラ
(Flea2) 1台を制御する機能を有する。
注意事項
下記ライブラリを使用しています。
●FlyCaptureSDK(Point Gray Reserch社製)
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/
NECトーキン3Dモーションセンサコンポーネント
概要
本コンポーネントは、NECトーキン社製3DモーションセンサMDP-A3U9Sの3次元姿勢を出力するコンポーネントです。
ライセンス
修正BSDライセンスに基づき配布されます。
詳しくは、LICENSE.txtおよびLICENSE_ja_jp.txtを御覧ください。
連絡先
東京大学 知能機械情報学専攻 情報システム工学研究室
itngr@jsk.t.u-tokyo.ac.jp
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1.7 | 1.0.0 | Windows XP | C++ | MotionSensorComponent.zip | README.pdf | 2011.07.06 |
人発見コンポーネント(サイズ検出)
概要
LRFのデータを使ってロボットの前に人間がいるかどうかを判断するコンポーネントです.
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
3月上旬頃公開予定
連絡先
奈良先端科学技術大学院大学 情報科学研究科
robotics-staff@is.naist.jp
〒630-0192 奈良県 生駒市 高山町 8916-5
Tel: 0743-72-5371, Fax: 0743-72-5379
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
オープンソース版作業対象認識モジュール群 座標系変換ツール
概要
オープンソース版作業対象認識モジュール群に付加して使用するツールです。
認識結果の座標系を変換するために利用します。
関連モジュール
オープンソース版作業対象認識モジュール群「OpenVGR」
ステレオカメラを利用し、指定された作業対象物の検出結果(3次元位置・姿勢)を
共通形式で出力するモジュール群です。
ドキュメント
はじめにお読みください
クロスマーカー検出プログラムの使い方
座標系変換行列計算プログラムの使い方
ライセンス
EPL Ver1.0
ソースコード
http://code.google.com/p/openvgr/downloads/list
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 タスクビジョン研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
email: openvgr-contact@m.aist.go.jp