修正BSDライセンスに基づき配布されます。 詳しくは、LICENSE.txtおよびLICENSE_ja_jp.txtを御覧ください。
東京大学 知能機械情報学専攻 情報システム工学研究室 itngr@jsk.t.u-tokyo.ac.jp
このコンポーネントは、Point Grey Research社製 IEEE-1394bカメラ(Flea2)2台を1つのステレオカメラとして扱い、最大2つのステレオカメラを制御する機能を有する。
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
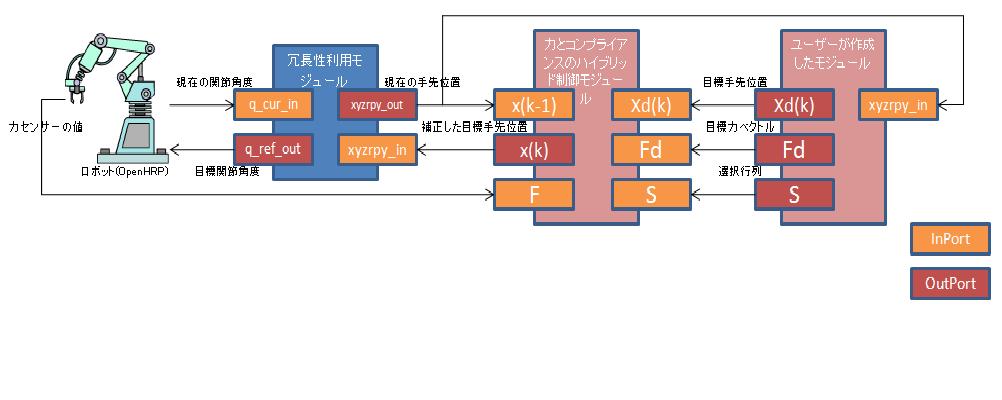
本モジュールは、ロボットのモデル、作業対象物のモデルから運動学を解き、 現在受けている外力から拘束面を推定し、拘束力を一定にしつつ指定された 目標位置にもっとも近くなる目標角度偏差を出力するモジュールです。
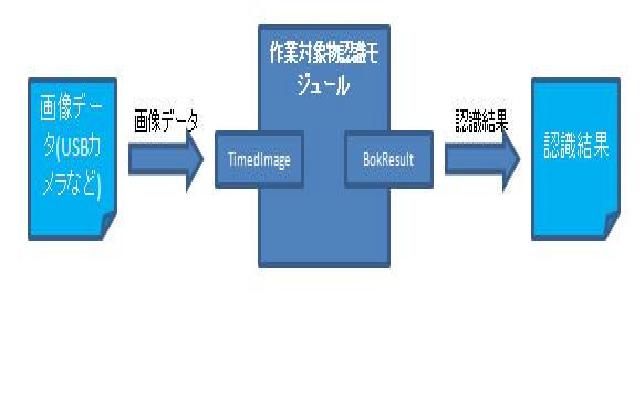
本モジュールは、入力された画像に対してBagOfKeypoints法を使用し、 作業対象物を認識し、認識した対象物と確度を出力するモジュールです。
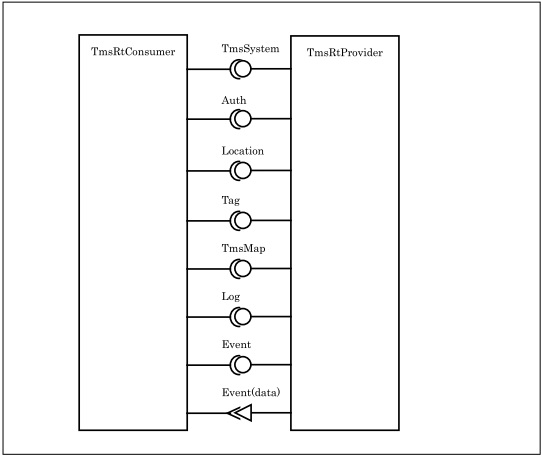
●利用にはタウンマネジメントシステムが必要です。コンポーネントに同梱しております。
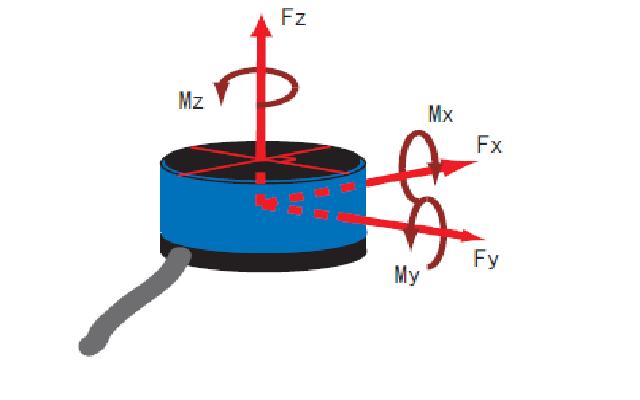
本コンポーネントは、ニッタ株式会社製の力センサ「IFS-70M35A25-M50B」のRTコンポーネントであり、 データポートやサービスポートから力とモーメントを出力します。 対応OS:Vine Linux + ART-Linux で動作を確認済みです。
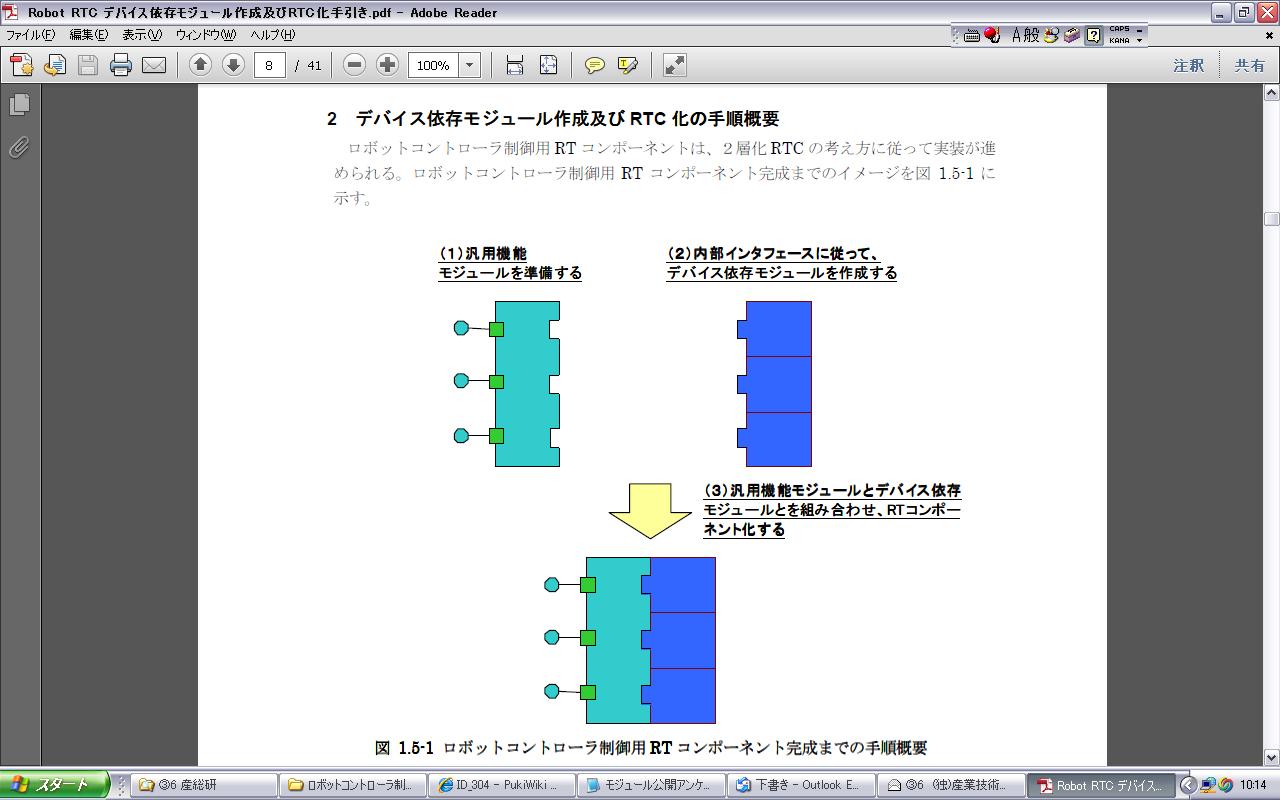
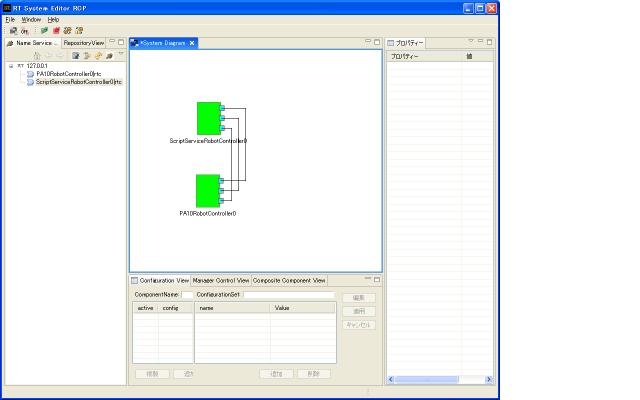
このコンポーネントは、ロボットコントローラ制御用RTCの共通インタフェースモジュールです。ACT共通インタフェース対応版です。
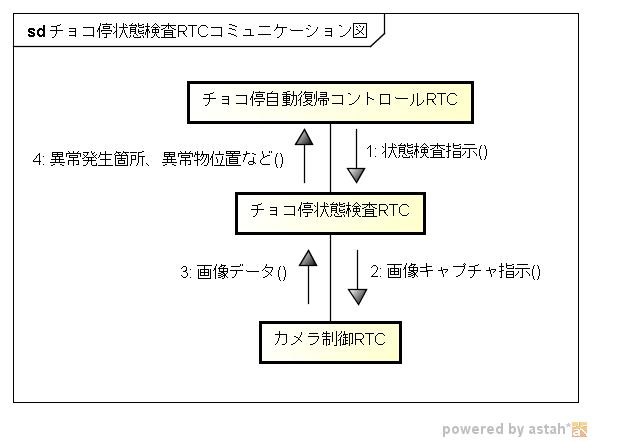
チョコ停自動復帰RTC群は、ロボット制御セル生産システムにおけるチョコ停(軽微な原因による一時的な 停止)に対し、人の手を介さずに自動的に異常状態から復帰することを目的とするRTC群です。 この中で本RTCは、チョコ停発生エリアにおける異常内容の識別から異常物の位置検出を行います。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

NECトーキン3Dモーションセンサコンポーネント
概要
本コンポーネントは、NECトーキン社製3DモーションセンサMDP-A3U9Sの3次元姿勢を出力するコンポーネントです。
ライセンス
修正BSDライセンスに基づき配布されます。
詳しくは、LICENSE.txtおよびLICENSE_ja_jp.txtを御覧ください。
連絡先
東京大学 知能機械情報学専攻 情報システム工学研究室
itngr@jsk.t.u-tokyo.ac.jp