作業知能モジュール群
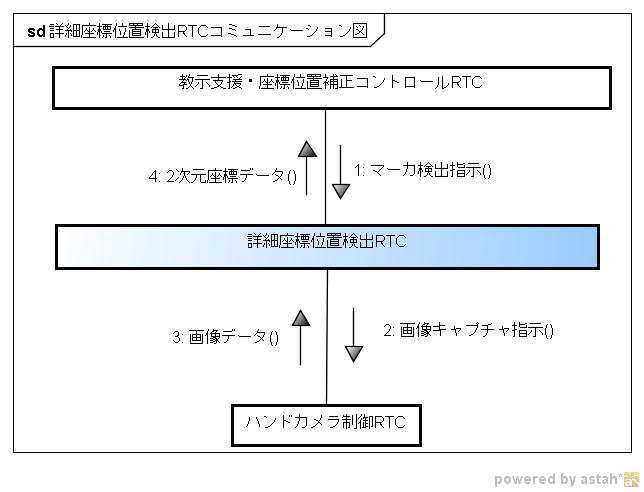
詳細座標位置検出RTC
概要
このコンポーネントは、画像ファイルを読み込んで、画像データ上の教示用の補助マーク1点を検出して、ロボット座標系におけるマーカの2次元座標で算出する。
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/
ステレオカメラキャリブレーションコンポーネント
概要
本コンポーネントは,CameraImage型でステレオカメラの両眼画像を取得し,内部パラメータ,外部パラメータを推定するためのコンポーネントです。
注意事項
以下のパッケージの追加インストールが必要になります。●opencv2.2
●RTMEXTenderが必要です。詳細は
http://www.jsk.t.u-tokyo.ac.jp/~h-yaguchi/rtmext/
を参照してください。
ライセンス
修正BSDライセンスに基づき配布されます。詳しくは、LICENSE.txtファイルをご覧ください。
連絡先
東京大学 知能機械情報学専攻 情報システム工学研究室itngr@jsk.t.u-tokyo.ac.jp
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| Rev.1 | 1.0.0 | Ubuntu | C++ | StereoCameraCalibration.tar.gz | README.txt | 2011.11.24 |
USBカメラコンポーネント(共通)
概要
共通カメラIFに準拠したカメラ画像取得コンポーネントです.
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
リンク先参照
連絡先
奈良先端科学技術大学院大学 情報科学研究科
robotics-staff@is.naist.jp
〒630-0192 奈良県 生駒市 高山町 8916-5
Tel: 0743-72-5371, Fax: 0743-72-5379
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
双腕協調制御RTC
概要
右手先位置・姿勢6自由度,左手先位置・姿勢6自由度の
合計12自由度を操作することで対象物の位置・姿勢の6自由度,
または対象物に与える外力・外モーメントの6自由度,
右手と左手の相対位置・姿勢偏差の6自由度,または対象物に
与える内力・内モーメントの6自由度の合計12自由度を制御可能。
どれを制御するかは選択行列Sで決定。
ライセンス
EPLライセンスを適用しています。
開発バージョン
ただいま、準備中。しばらくお待ちください。
連絡先
東北大学大学院工学研究科
〒980-8579 仙台市青葉区荒巻字青葉6-6-01
近野 敦
email:konno@space.mech.tohoku.ac.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
発話推定モジュール
概要
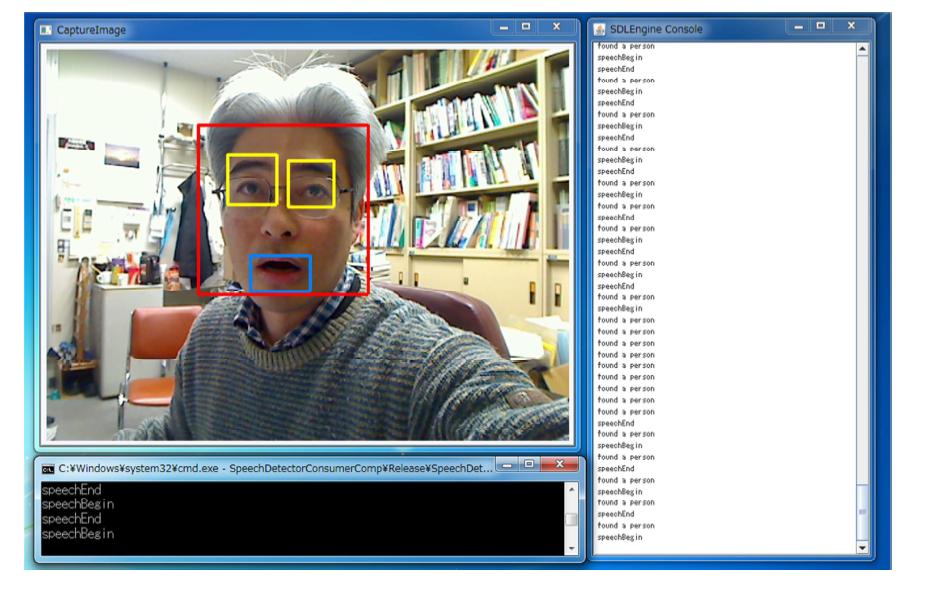
口の動きなどから発話しているかどうかを判断するモジュールです。OpenCVを利用しています。OpenCVに接続されているUSBカメラなどの
キャプチャーデバイスから画像を取得し、発話しているかどうかを推定し、
認識結果を出力します。
注意事項
下記ライブラリを使用しています。●OpenCV 1.0
ライセンス
EPLライセンスを適用します。 連絡先
九州工業大学情報工学研究院生命情報工学研究系ohashi@bio.kyutech.ac.jp
TEL/FAX 0948-29-7821/7801
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 2.0 | 1.0.0 | WindowsXP | C++ | SpeechDetector.2.0.zip | SpeechDetector_Doc.zip | 2012.01.24 |
MELFA外部制御モジュール
概要
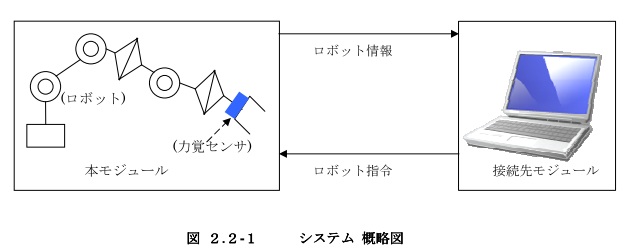
三菱電機産業用ロボット(MELFA)とニッタ製力覚センサの協調動作を
制御するためのRTC入出力ポートを提供する。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
三菱電機株式会社
先端技術総合研究所 業務部 技術情報課
http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html
お問い合わせ窓口)
ATC_webmaster@ra.MitsubishiElectric.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
カメラコンポーネント
概要
本コンポーネントはPoint Gray製IEEE1394カメラであるFlea,Flea2,
さらにはUSB接続のWebカメラに対応し,個々のカメラから獲得された画像を出力する。
カメラの制御およびカメラ出力用のインタフェースは,知能化プロジェクトで規定された共通I/Fに準拠している.
注意事項
下記ライブラリを使用しています。
●OpenCV 1.1 / OpenCV 2.3.1
●Fly Capture v1.8 Release 23
●Web カメラドイバ
ライセンス
修正BSDライセンスを適用しています。
詳しくは、ご連絡をお願い致します。
連絡先
国立大学法人 大阪大学 大学院基礎工学研究科 k-oohara@arai-lab.sys.es.osaka-u.ac.jp
〒560-8531 大阪府豊中市待兼山町1-3
Tel: 06-6850-6368, Fax: 06-6850-6341
http://www-arailab.sys.es.osaka-u.ac.jp/CameraIF/
Download
| Ver | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1.0 | 1.0 | WindowsXP | C++ | CameraComponents.zip | Manuals.zip | 2012.01.10 |
| 1.0 | 0.4.x / 1.0 | WindowsXP | C++ | RTFireWebCamera.zip | RTFireWebCamera_manual.zip | 2010.10.17 |
把持物体教示RTC
概要
共通カメラインタフェースに対応したバーコードリーダコンポーネント群です。
注意事項
下記ライブラリを使用しています。
●OpenCV 2.x (※)
●ARToolKitPlus-2.1.5
※OpenCV-2.2はARToolKitPlus?-2.1.5と干渉するので使えません。
ライセンス
OpenRTM-aist-1.0 のライセンスに準じます。
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 サービスロボティクス研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
Tel/Fax:029-861-3427/029-862-3493
email: srrg@m.aist.go.jp
Download
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
作業対象物認識モジュール
概要
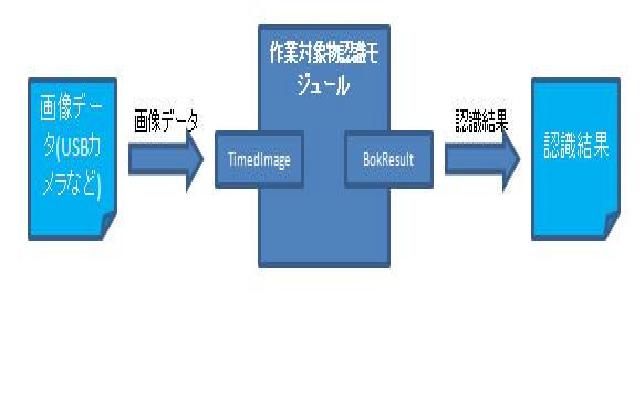
本モジュールは、入力された画像に対してBagOfKeypoints法を使用し、
作業対象物を認識し、認識した対象物と確度を出力するモジュールです。
注意事項
下記ライブラリを使用しています。●OpenCV 2.0
●SDL (Simple DirectMedia Layer)
●Ruby 1.8.7 http://ruby-lang.org/ja/
ライセンス
EPLライセンスを適用いたします。連絡先
東北大学大学院工学研究科 機械システムデザイン工学専攻konno@space.mech.tohoku.ac.jp
〒980-8579 仙台市青葉区荒巻字青葉6-6-01
Tel: 022-795-6972, Fax: 022-795-6971
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1 | 1.0.0 | Ubuntu | C++/Python | bag_of_keypoints_module-20110303.zip | document-bag_of_keypoints_module.pdf | 2011.04.08 |
作業対象物認識モジュール群
概要
産業技術総合研究所が開発している3次元物体の認識機能を応用し
指定された対象物体の位置・姿勢を共通形式で出力するモジュール群です。
関連モジュール
ステレオ画像取得RTC
認識結果の重畳表示RTC
画像データの表示RTC
注意事項
利用に際しては高機能3次元視覚システムVVVのキャリブレーションデータが必要になります。
詳細に関しましては下記へお問い合わせ下さい。
ライセンス
実行ファイルを有償でご提供させて頂きます。
詳しくは、下記へご相談ください。
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 タスクビジョン研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
email:irtsp-vvv@m.aist.go.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download