作業知能モジュール群
来訪者受付システム Ver1.0
概要
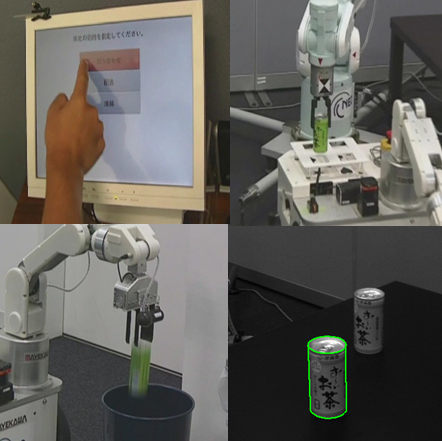
来訪者の入館・退館における受付業務を主としたオフィスサービスを行うもの
とする。
このシステムで行われるサービス内容は、表「サービス一覧」に示すサービス
に分割されており各サービス毎、及びサービス連動での動作を可能とする。
【サービス 一覧】
| No | 名称 | サービス内容 |
| 1 | 受付 | 訪問者の検知、端末操作による移動ロボットの呼出、担当者への連絡を行う。 |
| 2 | 給仕 | 来訪者に飲み物を提供する。 |
| 3 | 廃棄 | 飲み終わった空き容器の回収・廃棄を行う。 |
| 4 | 管理 | 上記のサービスの状態管理や来訪者の入館・退館管理及び、各端末・ロボットの状態管理を行う。 |
ライセンス
各モジュールのライセンス条項に帰属します。
連絡先
富士ソフト株式会社 ロボット事業グループ 商品開発ユニット
E-Mail :tnninomi@fsi.co.jp
注意事項・免責事項
本サイトのコンテンツをご利用される場合には、以下の記載事項・条件にご同意いただいたものとします。
・利用者がコンテンツを利用することにより生じたいかなる損害についても一切責任を負いません。
コンテンツの変更、削除等は、原則として利用者への予告なしに行います。
また、止むを得ない事由により、 コンテンツの公開を中断あるいは中止させていただくことがあります。
・コンテンツの情報の変更、削除、公開の中断、中止により、利用者に生じたいかなる損害についても一切責任を 負いません。
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)「次世代ロボット知能化技術開発プロジェクト」の一環として
開発されたことを記し、ここに感謝の意を表する。
NEDO-RTCs

Download
【ソース】
| 内容 | ファイル | 版 | 形式 | サイズ | 更新日 |
| 制御・受付・端末 関連 | TerminalSystem_10.zip | 1.0版 | ZIP | 2.5MB | 2011.06.30 |
| RH 関連 | RH_10.zip | 1.0版 | ZIP | 14.2MB | 2011.07.01 |
| PA10 アーム | PA10_ARM.zip | 1.0版 | ZIP | 40MB | 2011.07.01 |
| PA10 画像認識エンジン | OpenVGR-0.8.zip | 1.0版 | ZIP | 40MB | 2011.07.01 |
| PA10 画像認識その他 | OpenVGRextra.zip | 1.0版 | ZIP | 40MB | 2011.07.01 |
【ドキュメント】
| 内容 | ファイル | 版 | 形式 | サイズ | 更新日 |
| 統合検証 RTC開発ガイドライン | _ガイドライン.pdf | 1.0版 | 440KB | 2011.07.13 | |
| 仕様書(全部) | _仕様書10.zip | 1.0版 | ZIP | 2.47MB | 2011.07.07 |
| サービス動作機能仕様書 | _サービス動作機能仕様書10_10.pdf | 1.0版 | 624KB | 2011.07.07 | |
| 制御系端末操作機能仕様書 | _制御端末操作機能仕様書10_10.pdf | 1.0版 | 460KB | 2011.07.07 | |
| RH動作機能仕様書 | _RH動作機能仕様書10_10.pdf | 1.0版 | 1.76MB | 2011.07.07 | |
| PA10動作機能仕様書 | _PA10動作機能仕様書10_10.pdf | 1.0版 | 369KB | 2011.07.07 | |
| 設計書(全部) | _設計書10_01.zip | 1.0版 | ZIP | 8.05MB | 2011.07.07 |
| 制御系端末詳細設計書 | _制御端末詳細設計書10_01.pdf | 1.0版 | 5.60MB | 2011.06.30 | |
| RH詳細設計書 | _RH詳細設計書10_10.pdf | 1.0版 | 4.55MB | 2011.07.07 | |
| PA10詳細設計書 | _PA10詳細設計書10_10.pdf | 1.0版 | 1.57MB | 2011.07.01 | |
| 取扱説明書(全部) | _取扱説明書10_01.zip | 1.0版 | ZIP | 5.86MB | 2011.07.13 |
| 制御系端末取扱説明書 | _制御端末取扱説明書10_10.pdf | 1.0版 | 3.10MB | 2011.06.30 | |
| RH取扱説明書 | _RH取扱説明書10_05.pdf | 0.5版 | 2.58MB | 2011.07.13 | |
| PA10取扱説明書 | _PA10取扱説明書10_10.pdf | 1.0版 | 1.24MB | 2011.07.01 |
【参考資料】
| 内容 | ファイル | 版 | 形式 | サイズ | 更新日 |
| PA10関連(全部) | _PA10関連資料_10.zip | 1.0版 | ZIP | 6.75MB | 2011.07.01 |
| PA10システム制御モジュール 機能仕様書 | _PA10システム制御モジュール.pdf | 1.1版 | 214KB | 2011.06.30 | |
| ACT(中レベル)共通インターフェース仕様書 | _ACT(中レベル)共通インターフェース仕様書_1.0.2_.pdf | 1.02版 | 357KB | 2011.06.30 | |
| ACT(低レベル)共通インターフェース仕様書 | _ACT(低レベル)共通インターフェース仕様書_1.0.2.pdf | 1.02版 | 296KB | 2011.06.30 | |
| 分解運動速度制御モジュール 機能仕様書 | _分解運動速度制御モジュール.pdf | 1.0版 | 821KB | 2011.06.30 | |
| PA10制御モジュール 機能仕様書 | _PA10制御モジュール.pdf | 1.3版 | 253KB | 2011.06.30 | |
| RH707制御モジュール 機能仕様書 | _RH707制御モジュール.pdf | 1.2版 | 2011.06.30 | ||
| 作業対象認識モジュール群 ドキュメント | OpenVGR_doc-0.8-r1.zip | 0.91版 | ZIP | 3.9MB | 2011.06.30 |
| 作業対象認識モジュール群 座標変換ツールドキュメント | OpenVGRextra_doc.zip | 0.91版 | ZIP | 1.1MB | 2011.06.30 |
| RH関連(全部) | _RH関連参考資料.zip | 1.0版 | ZIP | 7.86MB | 2011.07.06 |
| RH制御PCの内蔵方法 | _RH制御PCの内蔵方法.pdf | 1.0版 | 1.4MB | 2011.06.30 | |
| RefHard2 アーム制御RTC | _RefHard2_ArmControllerRTC.pdf | 3.0版 | 240KB | 2011.06.30 | |
| オープンソース移動知能 モジュール群 オペレータ操作モジュール機能仕様書 | _オペレータ操作モジュール.pdf | 1.0版 | 789KB | 2011.06.30 | |
| オープンソース移動知能 モジュール群経路計画・軌道追従モジュール機能仕様書 | _経路計画・軌道追従モジュール.pdf | 1.0版 | 1.13MB | 2011.06.30 | |
| オープンソース移動知能 モジュール群 自己位置姿勢推定モジュール機能仕様書 | _自己位置姿勢推定モジュール.pdf | 1.0版 | 1.59MB | 2011.06.30 | |
| オープンソース移動知能モジュール群 障害物検知・衝突回避モジュール機能仕様書 | _障害物検知・衝突回避モジュール.pdf | 1.0版 | 1.62MB | 2011.06.30 | |
| オープンソース移動知能 モジュール群 走行系モジュール 機能仕様書 | _走行系モジュール.pdf | 1.0版 | 987KB | 2011.06.30 | |
| 移動SWG共通IF案 | _移動SWG共通IF案101008.pdf | 1.0版 | 362KB | 2011.06.30 | |
| RTC Camera Eye | _RTCCameraEye.pdf | 1.0版 | 747KB | 2011.06.30 | |
| 天井ナビゲーション資料 その1 天井画像地図の作り方マニュアル | _天井ナビゲーション資料1.pdf | 1.0版 | 78KB | 2011.07.13 | |
| 天井ナビゲーション資料 その2 天井画像マッチングによる推定自己位置の確認法 | _天井ナビゲーション資料2.pdf | 1.0版 | 503KB | 2011.07.13 | |
| 天井ナビゲーション資料 その3 推定位置が真値から大きく外れてしまったときの対処法 | _天井ナビゲーション資料3.pdf | 1.0版 | 57KB | 2011.07.13 | |
| AR Tool Kitマーカ検出・位置姿勢推定コンポーネントの使い方 | _ARToolKitマーカ検出・位置姿勢推定コンポーネントの使い方.pdf | 1.0版 | 148KB | 2011.07.06 |
複合情報GUIモジュール
概要
MultiGUI_RTCは複合情報GUIモジュールです。
ロボットの動作状態の適切な可視化によって,教示作業,特に設備や組立部品の
現物に合わせて追加・修正する作業パスの精密化作業の効率化を図ります。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
三菱電機株式会社
先端技術総合研究所 業務部 技術情報課
http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html
お問い合わせ窓口)
ATC_webmaster@ra.MitsubishiElectric.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
ロボットアーム(PA10)制御モジュール

概要
三菱重工業製汎用ロボットPA10の関節角速度制御を行うRTCです。本知能モジュールは、
ロボットアーム分解運動速度制御モジュール(ACT共通I/F対応版)
と組み合わせて使用します。
注意事項
下記ライブラリを使用しています。●依存ライブラリ:三菱重工業製PAライブラリ(商用)
ライセンス
商用以外の利用の場合、BSDライセンスが適用されます。商用利用の際には、個別に使用条件を検討させて頂きます。
詳しくは、ご連絡をお願い致します。
連絡先
富士ソフト株式会社 ロボット事業グループ 商品開発ユニットE-Mail :tnninomi@fsi.co.jp
Download
| Ver. | OS | RTM | 言語 | モジュール本体 | ドキュメント | Date |
| 1.0 | WindowsXP | 1.0.0 | C++ | PA10_1.0.zip | PA10_1.0_doc.zip | 2011.07.05 |
音声合成モジュール
概要
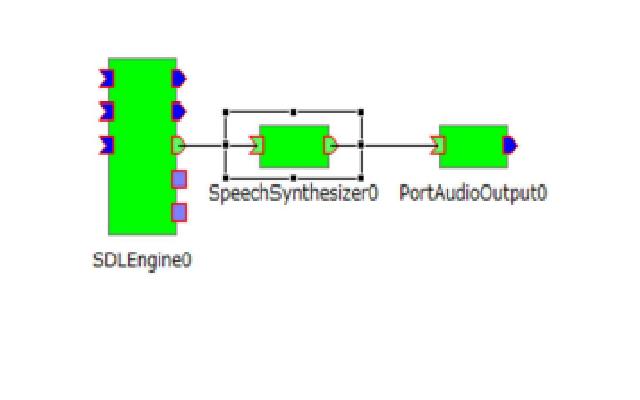
テキストから音声合成を行い出力するモジュールです。音声合成のエンジンには、AquesTalk を使用しています。
入力された発話用文字列を音声合成エンジンであるAquesTalkに
渡して音声サウンドデータを合成し、OpenHRIのPortAudioOutput
モジュール等を利用して出力しています。
ライセンス
EPLライセンスを適用します。 連絡先
九州工業大学情報工学研究院生命情報工学研究系ohashi@bio.kyutech.ac.jp
TEL/FAX 0948-29-7821/7801
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 2.0 | 1.0.0 | WindowsXP | C++ | SpeechSynthesizer.2.0.zip | SpeechSynthesizerDoc.zip | 2012.01.24 |
三菱重工製PA10ロボットコントローラ制御
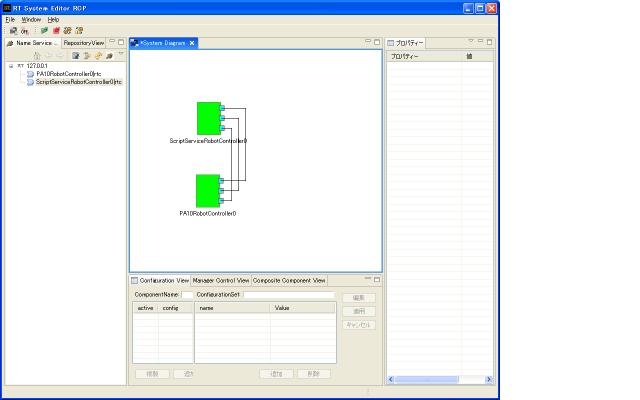
概要
このコンポーネントは、三菱重工製PA10向けのロボットコントローラ制御用RTCです。ACT共通インタフェース対応版です。 ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/
MCM4302向けカメラ制御RTC

概要
このコンポーネントは、マイクロビジョン社製USBカメラ(MCM-4302)1台を制御する機能を有する。
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/
テンプレートマッチングコンポーネント
概要
テンプレートマッチングを用いた対象物の位置・姿勢推定のためのアルゴリズムです. pythonスクリプトから制御することを想定しております. OpenMPを利用して並列化による高速化も実現しています.
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
3月上旬頃公開予定
連絡先
奈良先端科学技術大学院大学 情報科学研究科
robotics-staff@is.naist.jp
〒630-0192 奈良県 生駒市 高山町 8916-5
Tel: 0743-72-5371, Fax: 0743-72-5379
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
中位動作計画モジュール
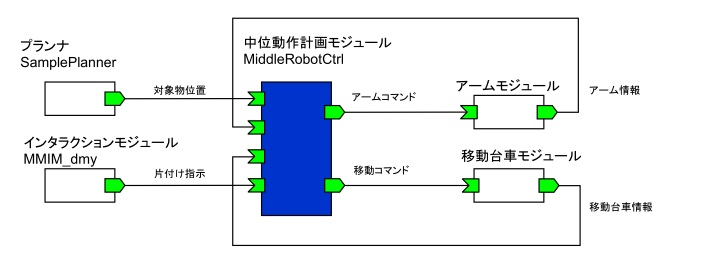
概要
カメラなどで取得した対象物の位置情報を入力すると
アームの目標位置列を順に出力するモジュール。
ライセンス
EPL
詳しい内容については、下記へご連絡願います。
連絡先
株式会社 東芝
研究開発センター 機械・システムラボラトリー
〒212-8582 川崎市幸区小向東芝町1
Tel :044-549-2193
Email:junichiro.ohga@toshiba.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1.0 | 1.0.0 | Ubuntu | C++ | MiddleRobotCtrl.zip | MiddleRobotCtrl_Doc2.zip | 2011.11.04 |
ロボットハンド(RH707)制御RTC

概要
シュンク・ジャパン(旧高野ベアリング)社製電動ハンドRH707 を
制御するRTC(動作確認用RTC付き)です。
注意点
下記ライブラリを使用しています。
●ライフロボティクス社製RH707ハンド用コントローラRH700C3制御
ライブラリ(商用)
ライセンス
EPLライセンスを適用しています。
連絡先
富士ソフト株式会社 ロボット事業グループ 商品開発ユニットE-Mail :tnninomi@fsi.co.jp
Download
| Ver. | OS | RTM | 言語 | モジュール本体 | ドキュメント | Date |
| 2.0 | WindowsXP | 1.0.0 | C++ | HandCtrl_1.0.zip | HandCtrl_1.0_doc.zip | 2011.07.07 |
| 1.0 | Debian | 0.4.x | C++ | rh707_doc.zip | hand_ctrl.tar_.zip | 2010.08.10 |
高レベル(タスクレベル)アーム
概要
タスクレベルコマンド(菓子Aをトレイの真中へ,等)を
中レベルコマンド(A1点へ移動,ハンドを閉じる,等)へ
書き下して中レベルコンポーネントへ送る
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
3月上旬頃公開予定
連絡先
筑波大学 大学院システム情報工学研究科
aiyama@esys.tsukuba.ac.jp
〒305-8573 茨城県つくば市天王台1-1-1
Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。