作業知能モジュール群
Hiroハンド
概要
HIROに搭載されているハンド部のみ(単体で購入)を独立にコンポーネントとして作成。
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
3月上旬頃公開予定
連絡先
筑波大学 大学院システム情報工学研究科
aiyama@esys.tsukuba.ac.jp
〒305-8573 茨城県つくば市天王台1-1-1
Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
汎用モーションRTC
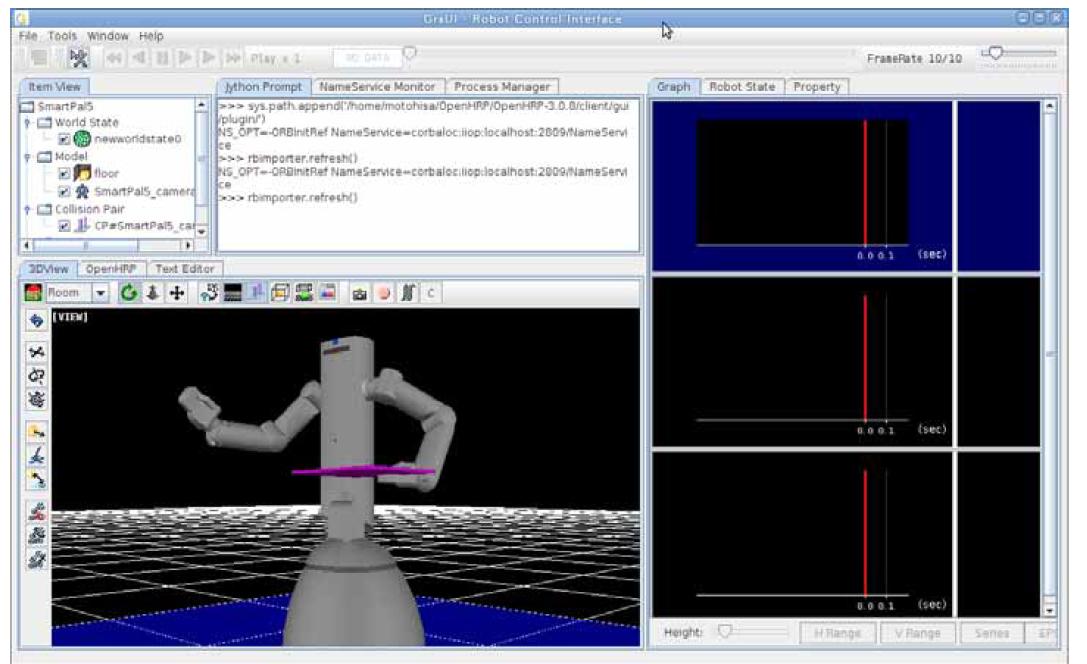
概要
本RTCは、SmartPalのようなアーム、腰、移動台車といった冗長自由度を備えたロボットにおいて、アーム先端の制御点の目標位置指令を入力として、
関節座標系における補間動作(PTP動作)や直交座標における直線補間
(CP動作)を計算し、キネマティクス変換を行った上で、各関節への低レベル
位置指令を生成するモジュールです。
汎用モーションRTCコア (東北大学殿から提供)とセットで機能します。
ソースコードは汎用モーションRTC(コンポーネント名IntegratedMotion)
のみ公開です。
ライセンス
EPLライセンスを適用しています。 連絡先
株式会社 安川電機 技術開発本部 開発研究所adachi@yaskawa.co.jp, motohisa@yaskawa.co.jp
Tel:093-571-6026
Download
| Ver. | OS | RTM | 言語 | モジュール本体 | ドキュメント | Date |
| 1.0 | Ubuntu | 1.0.0 | Java | IntegratedMotionRTC_1_0_Binary_0216.zip | IntegratedMotionRTC_1_0_Document_0216.zip | 2012-02-16 |
ハイブリッド視覚補正(2D)

概要
ロボットの教示作業をカメラ画像を見ながら対話的に行う用途を想定し
画面上での視認性を向上させるためのエッジ強調処理、コントラスト変換
などの画像処理を行います。
入力されたビットマップ画像に対して、画像変換処理を行い、その結果
画像(ビットマップ)を出力するモジュールです。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
三菱電機株式会社
先端技術総合研究所 業務部 技術情報課
http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html
お問い合わせ窓口)
ATC_webmaster@ra.MitsubishiElectric.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
来訪者受付システム
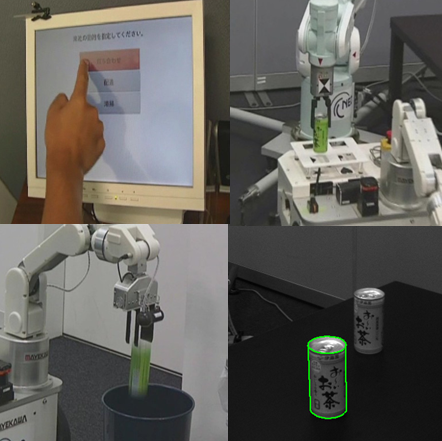
概要
来訪者の入館・退館における受付業務を主としたオフィスサービスを行うもの
とする。
このシステムで行われるサービス内容は、表.サービス一覧に示すサービスに
分割されており各サービス毎及び、サービス連動での動作を可能とする。
【サービス 一覧】
| No | 名称 | サービス内容 |
| 1 | 受付 | 訪問者の検知、端末操作による移動ロボットの呼出、担当者への連絡を行う。 |
| 2 | 給仕 | 来訪者に飲み物を提供する。 |
| 3 | 廃棄 | 飲み終わった空き容器の回収・廃棄を行う。 |
| 4 | 管理 | 上記のサービスの状態管理や来訪者の入館・退館管理及び、各端末・ロボットの状態管理を行う。 |
Download
ライセンス
各モジュールのライセンス条項に帰属します。
連絡先
富士ソフト株式会社 ロボット事業グループ 商品開発ユニット
E-Mail :tnninomi@fsi.co.jp
注意事項・免責事項
本サイトのコンテンツをご利用される場合には、以下の記載事項・条件にご同意いただいたものとします。
・利用者がコンテンツを利用することにより生じたいかなる損害についても一切責任を負いません。
コンテンツの変更、削除等は、原則として利用者への予告なしに行います。
また、止むを得ない事由により、 コンテンツの公開を中断あるいは中止させていただくことがあります。
・コンテンツの情報の変更、削除、公開の中断、中止により、利用者に生じたいかなる損害についても一切責任を 負いません。
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)「次世代ロボット知能化技術開発プロジェクト」の一環として
開発されたことを記し、ここに感謝の意を表する。
NEDO-RTCs

3次元距離計測モジュール
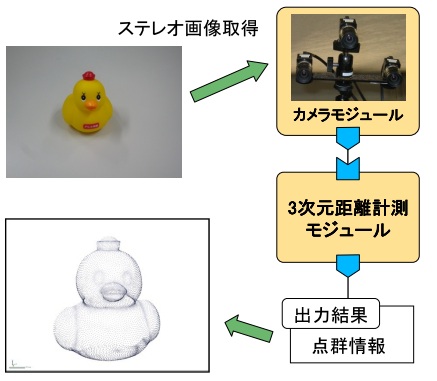
概要
入力されたステレオ画像を処理し、3次元位置や色などの
情報を持つ点群データを出力するモジュールです。
ライセンス
実行ファイルを有償でご提供させて頂きます。
詳しくは、下記へご相談ください。
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 タスクビジョン研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
email:irtsp-vvv@m.aist.go.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver. | RTM | OS | 言語 | ドキュメント | Date |
| 0.9 | 1.0.0 | Ubuntu | C++ | VVVEpbmTo3D.zip | 2010.12.21 |
チョコ停自動復帰コントロールRTC
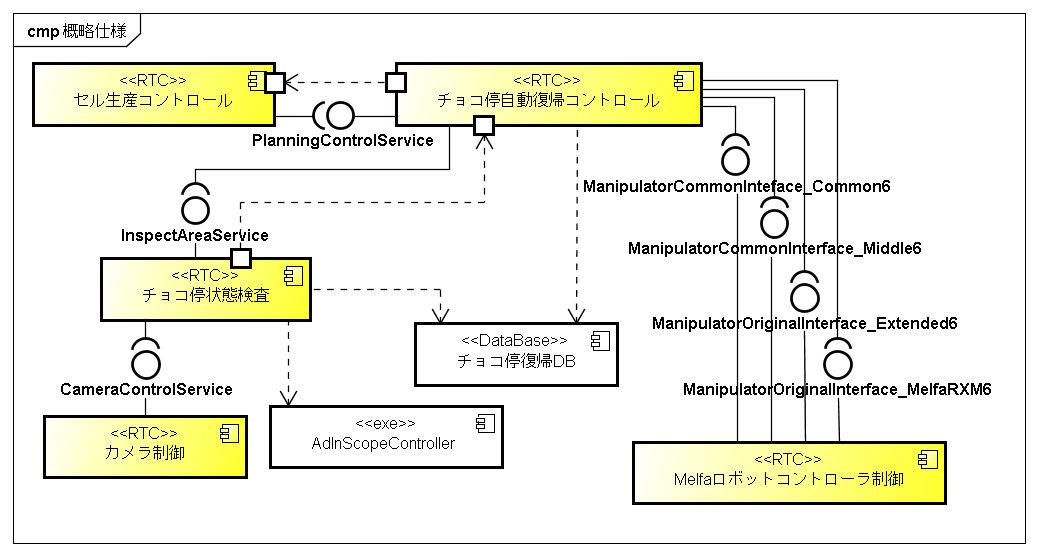
概要
チョコ停自動復帰 RTC群は、ロボット制御セル生産システムにおける
チョコ停(軽微な原因による一時的な停止)に対し、人の手を介さずに
自動的に異常状態から復帰することを目的とするRTC群です。
この中で本RTCは、チョコ停状態検査RTC(SENSE)や三菱電機製MelfaRXM
向けロボットコントローラ制御用RTC(ACT)を用いて、異常状態からの
復帰を行う。
注意事項
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/
物体位置姿勢推定RTC
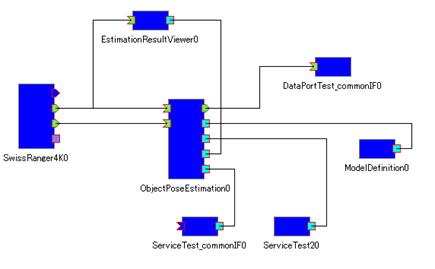
概要
このコンポーネントはスイス MESA社製の3次元距離測定カメラ SwissRanger SR4000からのデータを基に机上の複数個の直方体物体と円筒物体の3次元空間上での位置と姿勢を推定するコンポーネントです。
2012年2月22日にコンポーネント本体とマニュアルを更新しました。
注意事項
下記ライブラリを使用しています。
●OpenCV 2.1
ライセンス
修正BSDライセンスを適用しています。
連絡先
豊橋技術科学大学 情報・知能工学系
rtc@aisl.cs.tut.ac.jp
〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1
TEL: 0532-44-6826
URL: http://www.aisl.cs.tut.ac.jp/
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 2.0 | 1.0.0 | WindowsXP | C++ | ObjectPoseEstimation_v2.zip | ReadMe_ObjectPoseEstimation_v2.pdf | 2012.02.22 |
モデル登録・管理ツール
概要
共通カメラIFに準拠した把持対称物体情報管理コンポーネントです.
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
リンク先参照
連絡先
国立大学法人 大阪大学 大学院基礎工学研究科
k-oohara@arai-lab.sys.es.osaka-u.ac.jp
〒560-8531 大阪府豊中市待兼山町1-3
Tel: 06-6850-6368, Fax: 06-6850-6341
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。
汎用モーションRTCコア

概要
本モジュールは,世界座標系で手先位置を指定すると,移動台車も含めた逆運動学解を出力します。双腕ロボットでは,右手と左手の手先位置を同時
に指定できます。ユーザーは,対象とするロボットのVRMLモデルと標準
ロボットモデルへのジョイントとリンクの対応表を用意すれば,モジュール
は再コンパイル無しで使用できます。
安川電機(株)様の 汎用モーションRTC のコアとなるモジュールです。
注意事項
下記ツールを使用しています。●OpenHRP3 Ver.3.1.0
ライセンス
EPLライセンスを適用いたします。連絡先
東北大学大学院工学研究科 機械システムデザイン工学専攻konno@space.mech.tohoku.ac.jp
〒980-8579 仙台市青葉区荒巻字青葉6-6-01
Tel: 022-795-6972, Fax: 022-795-6971
Download
| Ver. | RTM | OS | 言語 | モジュール本体 | ドキュメント | Date |
| 1.0 | 1.0.0 | Ubuntu | C++ | redundancy_solution_package_20111206.zip | redundancy_solution_package_manual.zip | 2011.12.08 |
データ解釈モジュール
概要
本モジュールはデータベース(タウンマネジメントシステムRTC)に対して、環境中のオブジェクト情報の登録・更新・検索・取得を行うモジュールです。情報取得の際に、提供先に合わせて適切な座標変換を行います。関連モジュール
タウンマネジメントシステムRTCライセンス
修正BSDライセンスを適用しています。連絡先
東京大学大学院工学系研究科 精密工学専攻 淺間研究室E-Mail : rtc-contact@robot.t.u-tokyo.ac.jp
〒113-8656 東京都文京区本郷 7-3-1
Tel : 03-5841-6486
Download