Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
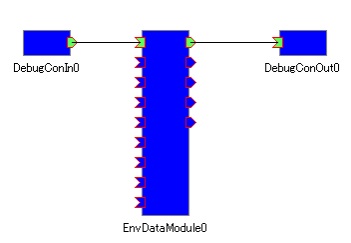
環境状況認識モジュール
概要
環境情報構造化プラットフォームから得られる、人々とロボットの位置や
「ロボットに近づく」「ロボットから離れる」「ある程度の時間以上ロボットの
近傍にいた人物が離れる」などの状況の認識結果を、外部RTCに出力します。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しくは、下記までご連絡をお願い致します。
連絡先
株式会社 国際電気通信基礎研究所
知能ロボティクス研究所 次世代ロボット知能化プロジェクト担当
〒619-0288 京都府相楽群精華町光台2-2-2
URL :http://www.irc.atr.jp/ptRTM/RTM-j.html
email:irc-contact@atr.jp