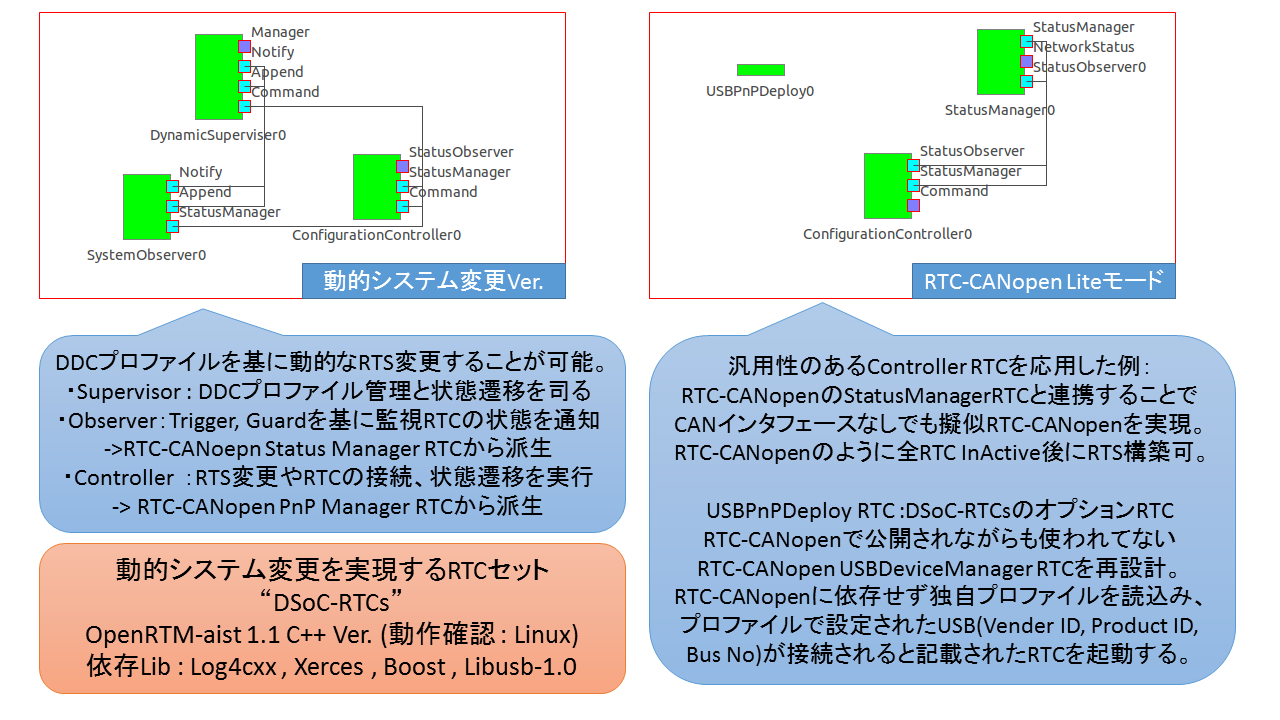
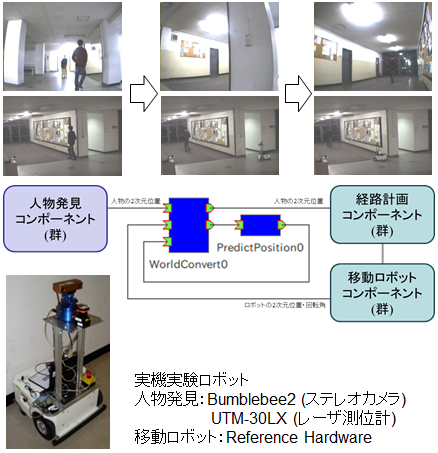
本コンポーネント群は,複数のRTSをステートマシンで管理し,任意のイベントをトリガーとしてRTSの動的変更機能を実装したコンポーネント群です. 例えば,動作する環境(部屋など)をまたいでロボットが動作する場合,その環境に合わせてRTSを変更することが可能です。
・動的システム変更では、DDCプロファイルを読み込み、特定のイベントが発生すると予め決めておいた別のStateへ遷移しRTSを動的に変更することが可能です。現状では、利用するRTCはすべて起動済みの状態のみのサポートです。RTCの動的起動は今後のサポートになります。 ・RTC-CANopen Liteモードでは、従来のCANインターフェースを接続しなくては使用できなかったRTC-RANopenシステムを、CANインターフェースなしで利用できるようにRTC-CANopen依存を排除したRTCです。動的システム変更で用いているController RTCのコンフィグを変更し、RTC-CANopen StatusManagerRTCと連携することで実現しています。
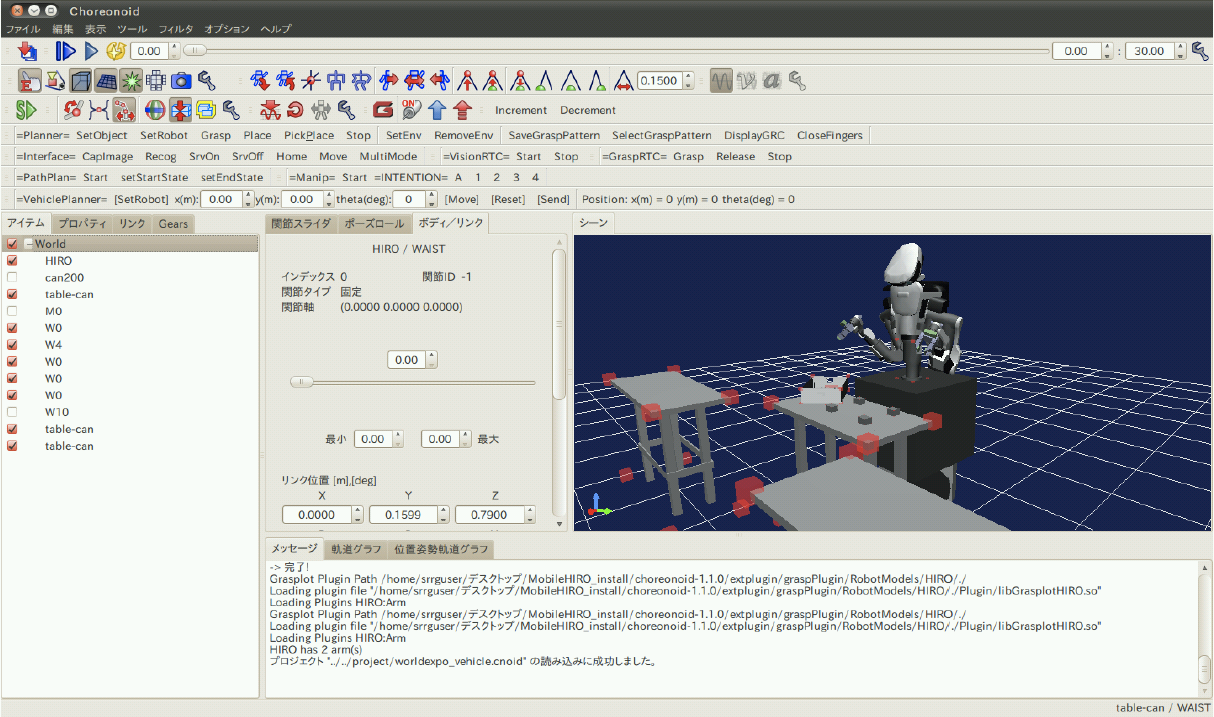
MobileHIRO操作用統合環境は移動型双腕ロボットMobileHIROを実機およびシミュレータ(Choreonoid)上で動作させるための統合環境です。
この統合環境では、移動型双腕ロボットMobileHIROの移動・把持動作の計画作成を行い、計画に基づいた指令を実際のロボットへ送信し作業を行わせることを目的としています。
本システムを利用することで、MobileHIROを以下の2つのステップで運用することが可能となります。
公開準備中
Kinova社のロボットアームJACOを制御するためのインターフェース。
・Windowsの.NETフレームワーク4以上でのみ動作します。 ・上記のミドルウェア環境のみで動作します。 ・本モジュールの使用にはJACOの制御ライブラリ(ライセンス付)が別途必要です。
修正BSDライセンスを適用しています。
独立行政法人 産業技術総合研究所 知能システム研究部門 サービスロボティクス研究グループ 〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二 Tel/Fax:029-861-3427/029-862-3493 email: srrg@m.aist.go.jp
共通カメラインタフェースに対応したバーコードリーダコンポーネント群です。
下記ライブラリを使用しています。 ●OpenCV 2.x (※) ●ARToolKitPlus-2.1.5 ※OpenCV-2.2はARToolKitPlus?-2.1.5と干渉するので使えません。
OpenRTM-aist-1.0 のライセンスに準じます。
下記ライブラリを使用しています。 ●OpenCV 2.1.0
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

モバイルロボットゲームパック
概要
特徴
仕様
コンポーネント群
新規作成