カメラなどで取得した対象物の位置情報を入力すると アームの目標位置列を順に出力するモジュール。
EPL 詳しい内容については、下記へご連絡願います。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:junichiro.ohga@toshiba.co.jp
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
リファレンスハード3号機の台車を位置制御するモジュール。 地図データや外界センサなしで手軽に位置制御を実行できる。 このモジュールはノンホロノミック台車に再利用できる。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:rie.katsuki@toshiba.co.jp
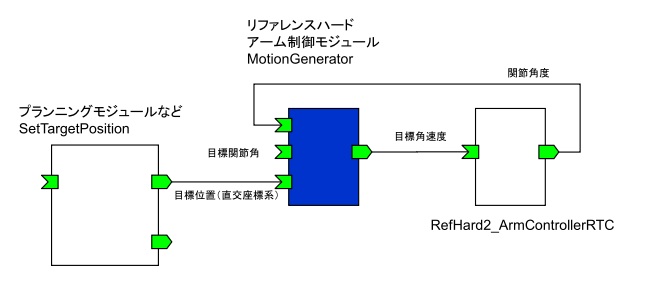
ファレンスハードウェアのアームを制御するためのモジュール。 目標位置もしくは目標関節角度を入力すると,関節角速度指令を出力する。
市販ゲームパッド用のRTCです。ボタンON,OFFやスティックの値を出力します。 また、ゲームバッドの操作に合わせてIIS::TimedVelocity形式の速度指令を出力します。 ドキュメントは、RTモジュールファイルに含まれています。
EPL 1.0
千葉工業大学 未来ロボット技術研究センター(furo) http://www.furo.org/ email:info@furo.org
Canon社製のNetworkカメラVC-C50iのRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
非営利・非商用での利用に限り、バイナリーファイルにて 無償公開にしています。 商用利用やソースコードの提供に関しましては 下記へご相談ください。
弊社の自社サイトでの公開を予定しています。 詳しくは、下記へご連絡願います。
Canon社製のNetworkカメラVB-C50iのRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
OpenRTM.NET OpenRTM.NET-1.0, OpenRTM.NET-1.1に対応。
修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
SICK社製のLMS100のRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
OpenRTM.NET OpenRTM.NET-1.2.1に対応。
Hemisphere社製のGPSセンサCrescentA100のRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク





中位動作計画モジュール
概要
カメラなどで取得した対象物の位置情報を入力すると
アームの目標位置列を順に出力するモジュール。
ライセンス
EPL
詳しい内容については、下記へご連絡願います。
連絡先
株式会社 東芝
研究開発センター 機械・システムラボラトリー
〒212-8582 川崎市幸区小向東芝町1
Tel :044-549-2193
Email:junichiro.ohga@toshiba.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。