This project built a RTC set of Kobuki. Those RTCs are going to build basic functions of Kobubki to be a service robot. For a service robot, basic functions are voice controlling and navigating in the indoor environment. So this project focuses on those two functions.



3次元フロー生成コンポーネント
概要
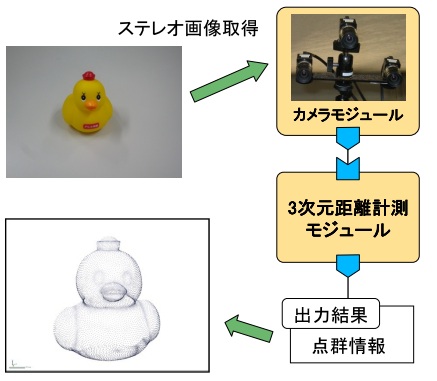
本コンポーネントは、株式会社富士通研究所製画像処理認識ハードウェアモジュールNXV1-1394-PCBにて画像をキャプチャして、3次元フローを出力するコンポーネントです。
注意事項
本コンポーネントの動作環境は、以下のとおりです。
●画像認識ボード用組込Linux(富士通研究所様ご提供)
●OpenRTM-aist-1.0.0(C++版)の富士通画像認識モジュール用クロスコンパイル)
(株式会社セック様より詳しい情報はご案内予定)