初心者のRTミドルウェアを使用したメディアアート制作を支援するために、具体的な制作事例を公開したウェブサイトを作成しました。
現在はこちらでコミュニティ活動を行なっています。 http://media-rt.weebly.com/
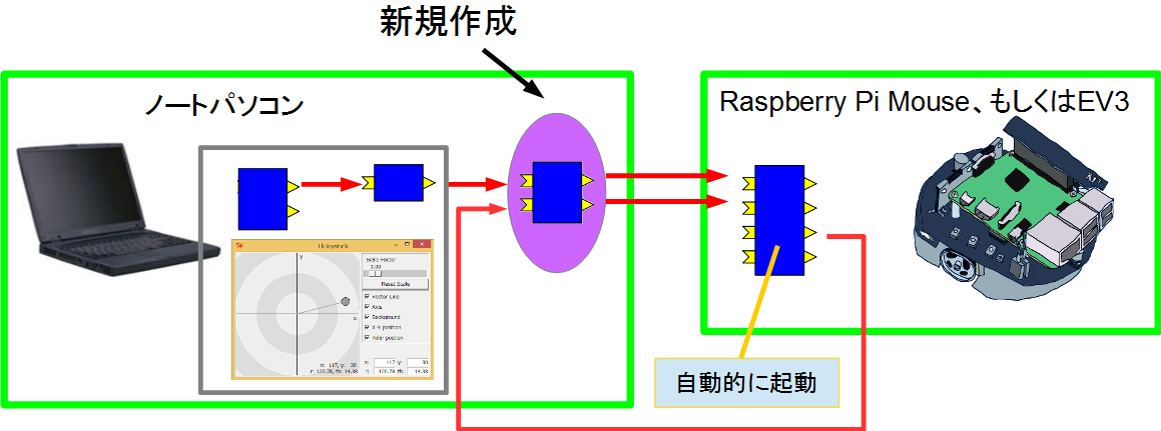
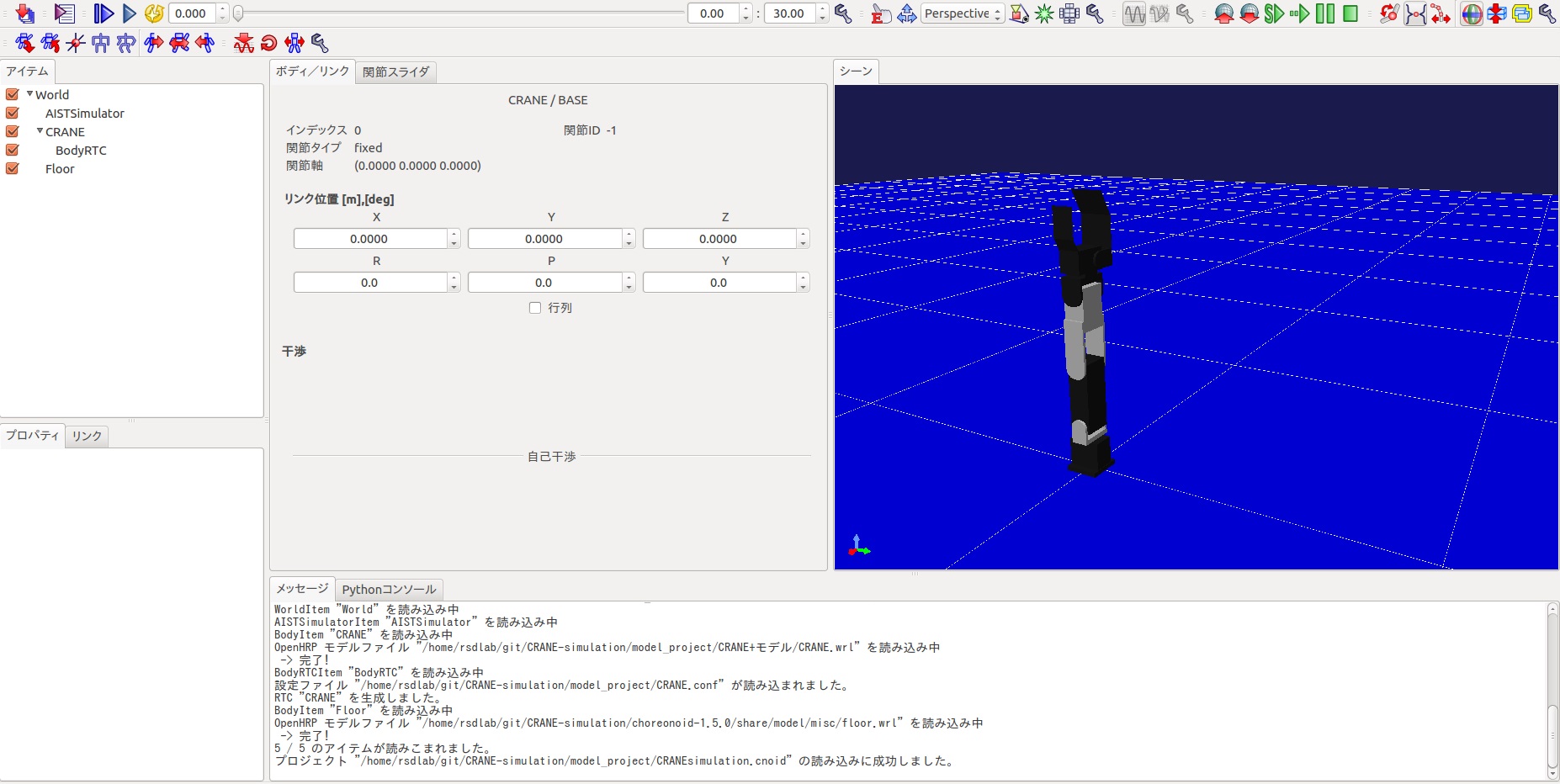
教育用ロボットアームであるCRANE+を動力学シミュレータChoreonoid上で動作する環境を構築しました。 RTコンポーネントを使って簡単に動かすことができるのでロボットアーム教育に活用できます。
OpenRTM上でMongoDBにアクセスするためのコンポーネント
センサーやロボットから出力されたデータをMongoDBに格納します
Kobuki,NAVIO+,Kinect用に作成
任意のコンポーネント用に作成するためのドキュメントも用意
ZIPファイル
授業中に集中せず読書やスマホ,寝ている学生は少なくありません. 授業に集中してもらうため,また,先生の学生を注意する手間を省くために注目度を測定するRTCを開発しました. 教室内をカメラで見回し,最初に検出した顔と指定時間後に検出した顔の数から注目度を計算します. 注目度が低い場合は警告としてアラームを鳴らすことができるため,学生の注目度を上げることが可能です. 注目度は静止画像に載せて保存されるので後から様子を視覚的に確認することができます.
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


四足歩行ロボット制御用RTコンポーネント群
概要・特徴