RTリポジトリは、RTコンポーネントの仕様およびRTCモジュール、RTシステム仕様、ハードウェア仕様を蓄積/管理し、容易に利用するためのデータベースです。利用形態に応じて、インターネット版、イントラネット版、ローカル版のリポジトリを利用可能です。
非営利・非商用での利用に限り、評価版をご提供可能です。
詳しくは、下記の連絡先までご連絡ください。
本システムは、新エネルギー・産業技術総合開発機構(NEDO)の次世代ロボット知能化技術開発プロジェクトの一環として開発されたことを記し、ここに感謝の意を表します。
株式会社 セック 開発本部 第四開発部(RTミドルウェア担当) URL:http://www.sec.co.jp/robot/index.html e-mail:robot@sec.co.jp
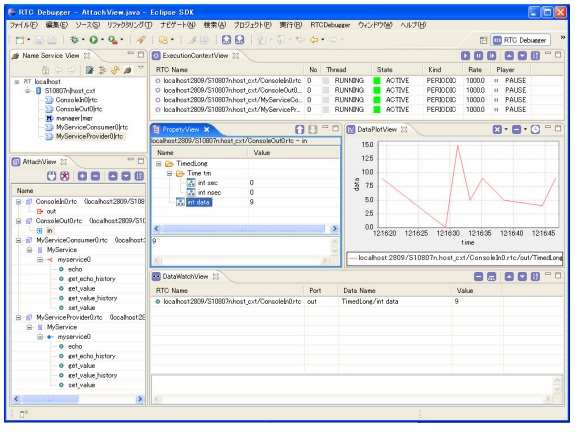
RTCデバッガはRTコンポーネントを検証(テスト/デバッグ)するためのGUIツールです。RTコンポーネントのテスト効率向上、品質向上に貢献します。
非営利・非商用での利用に限り、バイナリーファイルにて無償公開にしています。
セックのロボットサイトにて公開しています。
PyRTSeamは、RTコンポーネント(RTC)を容易に開発するためのライブラリです。 独立行政法人産業技術総合研究所が開発したRTミドルウェア実装である OpenRTM-aist-Python上で動作します。 PyRTSeamを利用すると、RTCのソースコードが従来よりも簡潔になり、 可読性が向上します。 これにより、RTCの開発効率、保守性が向上します。
MITライセンスを適用しています。
弊社の自社サイトで公開しています。
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表します。
富士通九州ネットワークテクノロジーズ株式会社から販売されている画像処理モジュールは、小型、低消費電力で高度な画像認識性能を持つモジュールです。 本ドキュメントでは、画像処理モジュール上で、独立行政法人産業技術総合研究所が開発しているRTミドルウェア実装であるOpenRTM-aistを動作させる方法を説明します。
本ドキュメントは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 作成されたことを記し、ここに感謝の意を表します。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
RTリポジトリ
概要
RTリポジトリは、RTコンポーネントの仕様およびRTCモジュール、RTシステム仕様、ハードウェア仕様を蓄積/管理し、容易に利用するためのデータベースです。利用形態に応じて、インターネット版、イントラネット版、ローカル版のリポジトリを利用可能です。
ライセンス
非営利・非商用での利用に限り、評価版をご提供可能です。
Download
詳しくは、下記の連絡先までご連絡ください。
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)の次世代ロボット知能化技術開発プロジェクトの一環として開発されたことを記し、ここに感謝の意を表します。
連絡先
株式会社 セック
開発本部 第四開発部(RTミドルウェア担当)
URL:http://www.sec.co.jp/robot/index.html
e-mail:robot@sec.co.jp