




ダウンロード
最新バージョン : 2.0.2-RELESE
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM@Github
OpenRTM-aist GitHubサイト
ROS
Robot Operating System
Choreonoid
モーションエディタ/シミュレータ
DAQ-Middleware
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM-aist GitHubサイト
Robot Operating System
モーションエディタ/シミュレータ
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
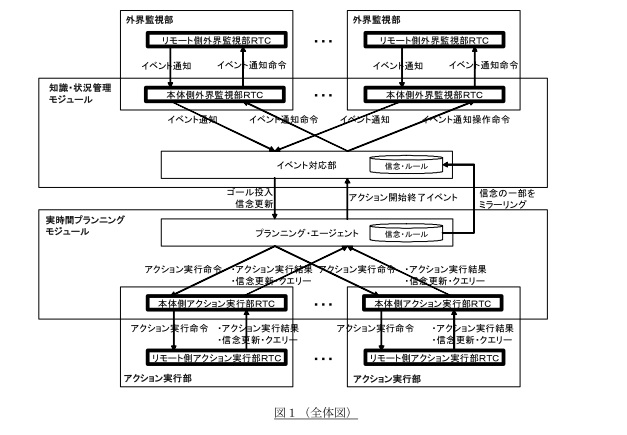
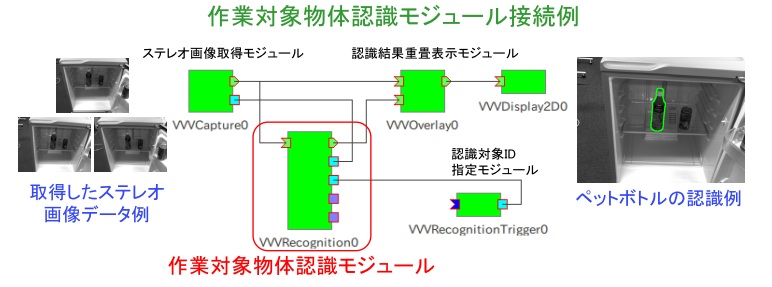
環境データモジュール
概要
各種センサからのセンサデータや、外部RTCモジュールより得られた
環境データを統合し、上位層モジュールの要求に応じて出力する。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しくは、下記までご連絡をお願い致します。
連絡先
株式会社 国際電気通信基礎研究所
知能ロボティクス研究所 次世代ロボット知能化プロジェクト担当
〒619-0288 京都府相楽群精華町光台2-2-2
URL :http://www.irc.atr.jp/ptRTM/RTM-j.html
email:irc-contact@atr.jp