来訪者の入館・退館における受付業務を主としたオフィスサービスを行うもの とする。 このシステムで行われるサービス内容は、表.サービス一覧に示すサービスに 分割されており各サービス毎及び、サービス連動での動作を可能とする。
【サービス 一覧】
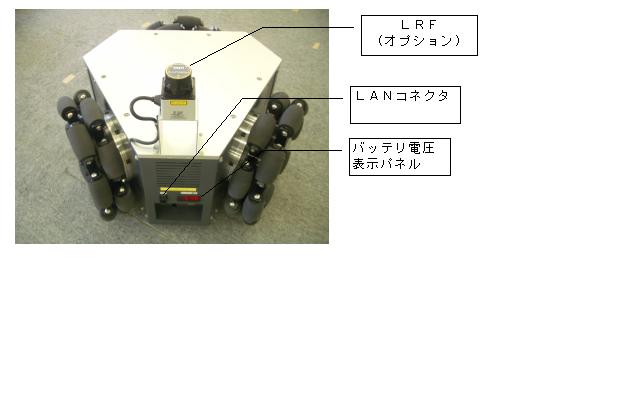
RTC-CANopenを利用する上でのリファレンスとするために開発したロボット(リファレンス ロボット)を操作するモジュール群です。
●リファレンスロボットはテクノクラフト社のBeegoを対象に設計してあります。 ●リファレンスロボットの実行にはRTC-CANopenが必要となります。
・RTC-CANopenリファレンスマニュアルの著作権は,芝浦工業大学水川研究室に 帰属します。 ・これらのコンポーネント群は,非営利目的での使用及び改変自由ですが,商用利用の 場合は別途ご相談下さい。 なお,本モジュール群を使用して発生したいかなる障害についても責任を負いません。
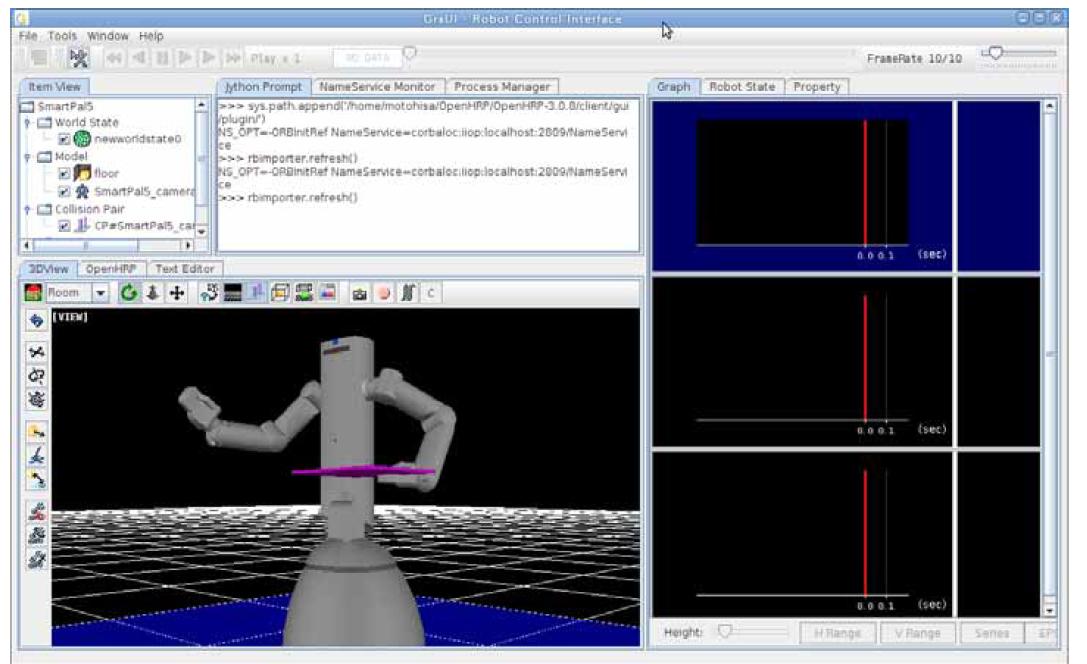
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


来訪者受付システム
概要
来訪者の入館・退館における受付業務を主としたオフィスサービスを行うもの
とする。
このシステムで行われるサービス内容は、表.サービス一覧に示すサービスに
分割されており各サービス毎及び、サービス連動での動作を可能とする。
【サービス 一覧】