ロボットプログラミングの学習では実機とシミュレータを切り替えることのできる教材が有用である.大阪電気通信大学では,RTミドルウェアとChoreonoidを利用してそのような教材を構成し授業を行っている.しかし,それらの標準のソフトウェアだけでは,操作が煩雑で学習の妨げになりやすく,実機を複数人で共用する場合にトラブルが起こりがちであった.そこで,rtctreeとTkinterを利用したGUIの支援ツールを開発し授業で活用した.本発表では,それを発展させ,設定ファイルを書き換えることによって様々な実機とシミュレータの組み合わせに利用できるように汎用化したツール,ロボットプログラミングマネージャ(RPM)を紹介する.
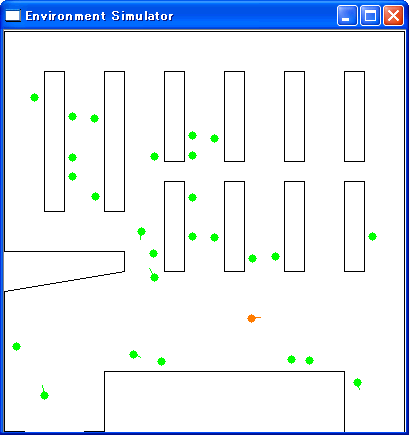
本システムは、電気通信大学知能システム学講座に設置されている エアホッケーロボットを使った対戦アルゴリズム開発を促進するものであり、 以下の4つのコンポーネントで構成されています。
これらのコンポーネント群を利用して対戦アルゴリズムRTCを作成することで、 対戦アルゴリズムの開発や比較検証を容易に行うことができます。
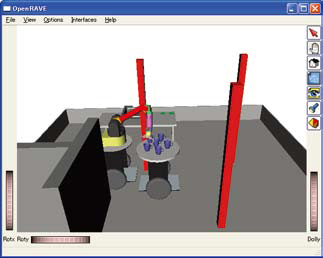
ロボットアームなどのマニュピュレーションを行うオープンソースであるOpenRAVEに機能をRTC経由で利用することができる。
Eclipse Public License - Version 1.0
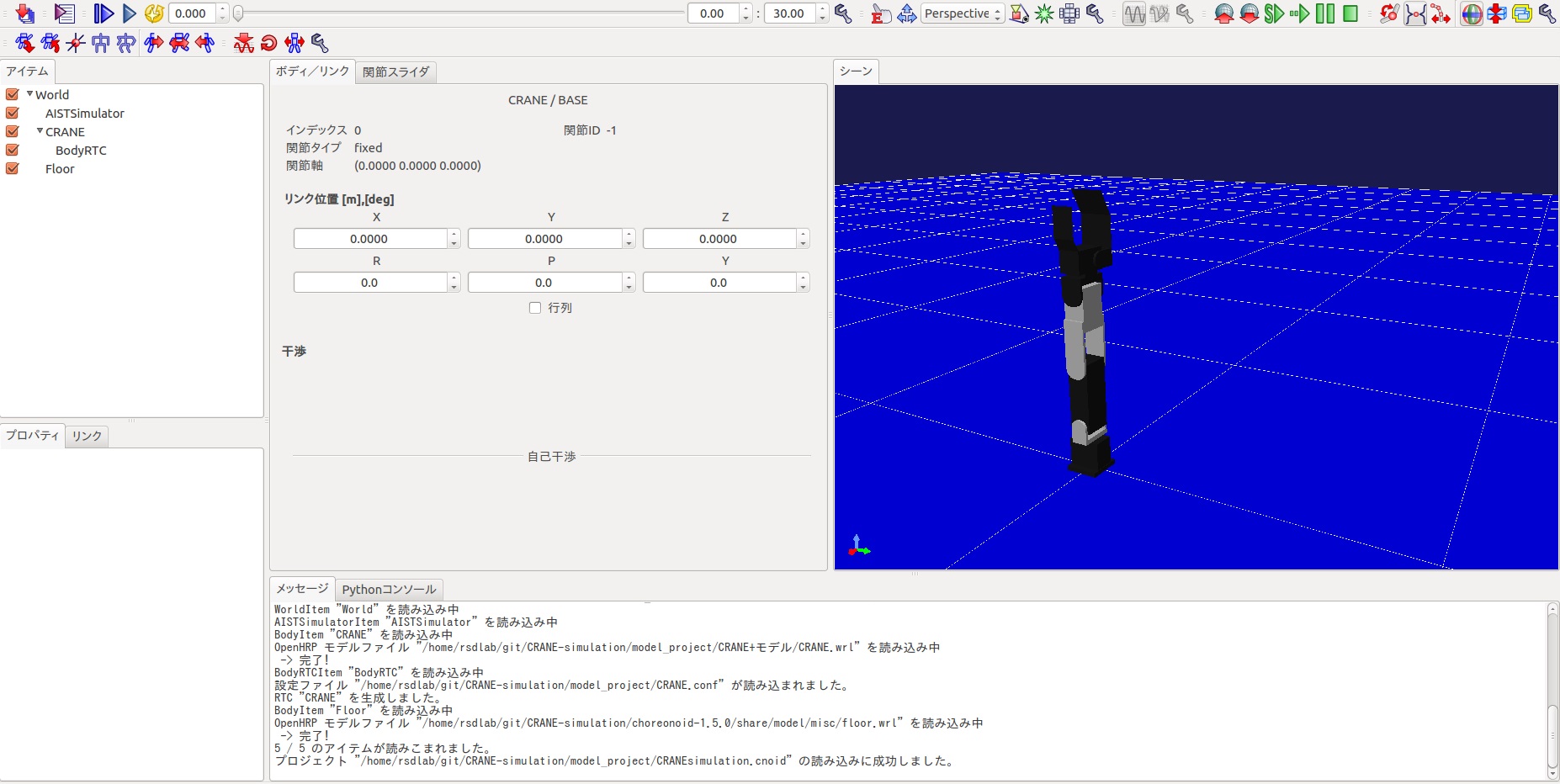
教育用ロボットアームであるCRANE+を動力学シミュレータChoreonoid上で動作する環境を構築しました。 RTコンポーネントを使って簡単に動かすことができるのでロボットアーム教育に活用できます。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
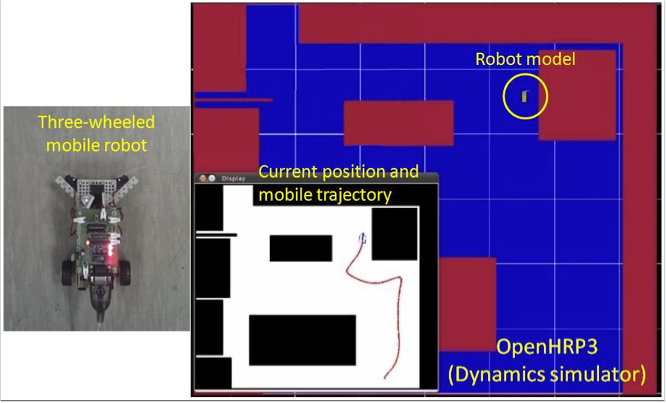
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク





実機とシミュレータを併用するロボットプログラミング教材のための支援ツール
概要・特徴
ロボットプログラミングの学習では実機とシミュレータを切り替えることのできる教材が有用である.大阪電気通信大学では,RTミドルウェアとChoreonoidを利用してそのような教材を構成し授業を行っている.しかし,それらの標準のソフトウェアだけでは,操作が煩雑で学習の妨げになりやすく,実機を複数人で共用する場合にトラブルが起こりがちであった.そこで,rtctreeとTkinterを利用したGUIの支援ツールを開発し授業で活用した.本発表では,それを発展させ,設定ファイルを書き換えることによって様々な実機とシミュレータの組み合わせに利用できるように汎用化したツール,ロボットプログラミングマネージャ(RPM)を紹介する.