一人乗り電気自動車ロボット化
一人乗り電気自動車ロボット化
投稿日時:
水, 2013-11-27 18:09
概要
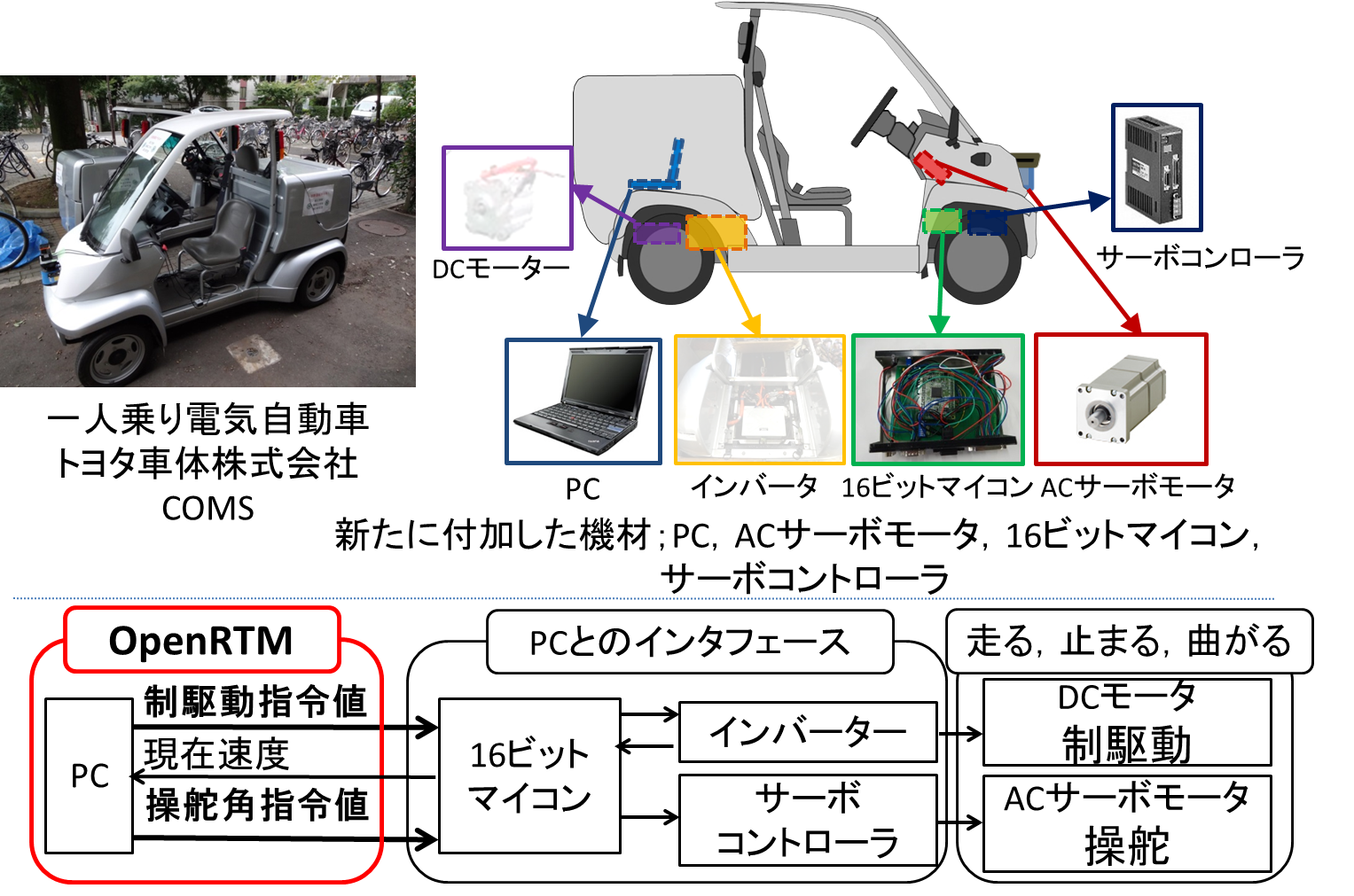
- 本プログラムは、PCで制御可能な一人乗り電気自動車ロボットをRTMミドルウェア上で制御するためのコンポーネントです。
- 電気自動車としてトヨタ車体(株)製超小型EV「COMS」を使用しています。COMSをベースにロボット化の改造をしました。
- 入力・出力ポートの一部の型はTimedVelocity2D等ExtendedDataTypeのデータ型を使用しています。
- このコンポーネントは、Open-RTMと電気自動車に以下のような相互効果をもたらします。
- 電気自動車分野にOpen-RTMというオープンソースな開発環境を提供する。
- Open-RTMに電気自動車という新たな開発領域を提供する。
- これらによって双方の技術共用が可能となり、相乗的な発展が期待できる。
特徴
- 16ビットマイコンを使用(PCからの信号が途切れた際に自動停止)
- 一人乗り電気自動車ロボットへの速度指令や,一人乗り電気自動車ロボットのステータスの出力
- 様々なRTモジュール群を搭載可能
- COMS: 一人乗り電気自動車ロボットへ速度指示・一人乗り電気自動車ロボットのステータス出力
コンポーネント
- COMS: 一人乗り電気自動車ロボットへ速度指示・一人乗り電気自動車ロボットのステータス出力
- Platooning_vehicle: 車両追従RTC
ダウンロード
- RTC : http://www.rs.noda.tus.ac.jp/hmlab/Electric_Vehicle_RTC.html
- Readme : http://www.rs.noda.tus.ac.jp/hmlab/rtc/si2013/Readme.pdf
更新情報
- 2013年12月16日 ドキュメントとソース分離
- 2013年12月17日 車両追従RTCを追加
問合先(メールアドレス):
hiroshihisahara0125@gmail.com
最終更新日時:
火, 2013-12-17 23:44
コメント
ソースとドキュメントは別々にダウンロードできた方がよいと思います。試そうとする人はまずマニュアルでどういうことができるものなのかを判断します。ソースのZIPにマニュアルが含まれていてもいいのですが、マニュアルは別途ダウンロードできるようになっていた方が親切です。
ご指摘ありがとうございます。 東京理科大学の久原です。 ご指摘いただいた通り、ソースファイルとは別にマニュアルのみのリンク先も追加しました。
あと、screen shot画像がリンク切れで見えません。正しく設定してください。