Webコンテンツに設置しているソーシャルネットワークサービス(SNS)のボタンの新しい反応を提示するデバイスの開発を行った。コンテンツの反応の取得には各サービスによって方法が異なっており、仕様変更により様々な反応の取得方法が提案されている。 それに伴い、RTミドルウエアを用いて効率的にデバイスを開発を行った。
代表的なソーシャルネットワーキングサービス(SNS)であるTwitterに投稿を行えるコンポーネントです。 これによって、センサを搭載したロボットが自身の状態をSNSに投稿し、多くの人々がロボットと接する機会が増えるでしょう。
特に近年WEBのサービスとして音声認識や画像検索をはじめとした技術の利用が可能となってきています。 これによりWEB上の膨大な知識を利用することが可能となります。googleで提供するサービスのうち、音声認識や音声合成、そのほかの検索サイトによる検索サービスを利用するRTC群を開発しました。
小型ヒューマノイドロボット「NAO」(アルデバランロボティクス)のRTCです. <img src="" width="480" />
このコンポーネントは以下の機能があります. 1. TextToSpeech 2. Motion (Direct Motor Control and Walk) 3. Memory (Sensory data aquisition) 4. Audio 5. Vision 6. Speech Recognition
Launguage : Python Operating System : Mac, Win, Linux Depends : pynaoqi 1.14.5, OpenRTM-aist 1.1 Python version.
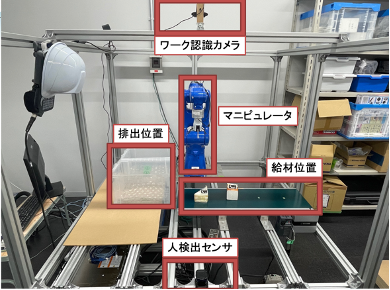
近年,ロボット技術や情報技術の発展により,ロボットは産業分野だけにとどまらず,私たちの生活に密に係わる予想される.今までロボットの操作は特別な訓練を受けた人が主であったが,今後社会においてより多くの人々がロボットの操作を行う可能性があるため,今後のロボットには直感的かつ容易な操作方法が望まれる.そこで,人とロボットとのインタラクティブな意思疎通により操作を容易にする研究を行っている.インタラクティブな意思疎通の方法の1つとして指差しに着目し,直感的に物体の位置情報やロボットの移動経路などの入力を行うためのコンポーネントを開発した.
本研究ではエンターテインメント用途のロボットの中でも,音とアニメーションが同調することで人を楽しませる,いわゆる「オーディオ・アニマトロニクス」で利用するためのRTコンポーネント群を作成する. 作成したRTコンポーネントは「スクリプト制御」「音声合成」「サーボ制御」の3つから構成され,組み合わせによってスクリプトに沿ったオーディオ・アニマトロニクスの発話とアニメーションの処理を簡単に実装できる.
https://github.com/thorikawa/rtc-script-reader
https://github.com/thorikawa/rtc-johnny-five
https://github.com/thorikawa/rtc-rospeex
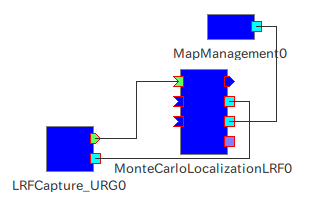
本プログラムは、LRF距離データ,オドメトリ情報を取得し,地図とのマッチングを行うことで 自己位置を推定するRTコンポーネントです。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


 " width="480" />
" width="480" />
Webコンテンツに対する反応を提示するデバイスの開発
概要
Webコンテンツに設置しているソーシャルネットワークサービス(SNS)のボタンの新しい反応を提示するデバイスの開発を行った。コンテンツの反応の取得には各サービスによって方法が異なっており、仕様変更により様々な反応の取得方法が提案されている。 それに伴い、RTミドルウエアを用いて効率的にデバイスを開発を行った。