このコンポーネントは、マイクロビジョン社製USBカメラ(MCM-4302)1台を制御する機能を有する。
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
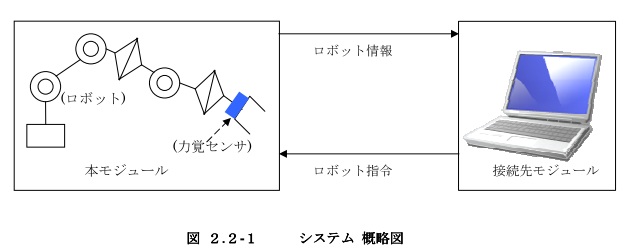
三菱電機産業用ロボット(MELFA)とニッタ製力覚センサの協調動作を 制御するためのRTC入出力ポートを提供する。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
三菱電機株式会社 先端技術総合研究所 業務部 技術情報課 http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html お問い合わせ窓口) ATC_webmaster@ra.MitsubishiElectric.co.jp
MIND STORMとRGB-Dカメラを用いた3Dモデルの作成可能なRTCを公開します。
ドキュメント詳細は以下のリンク先で公開しています。 http://www1.meijo-u.ac.jp/~kohara/cms/si2019-fukao
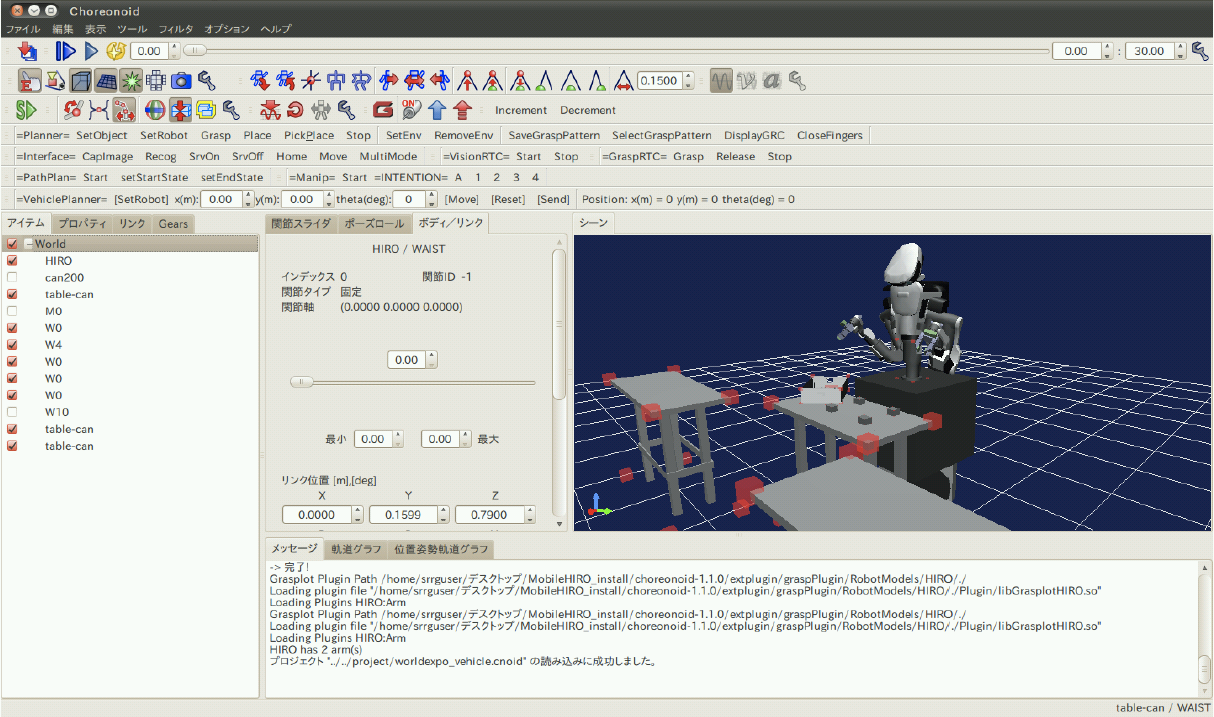
MobileHIRO操作用統合環境は移動型双腕ロボットMobileHIROを実機およびシミュレータ(Choreonoid)上で動作させるための統合環境です。
この統合環境では、移動型双腕ロボットMobileHIROの移動・把持動作の計画作成を行い、計画に基づいた指令を実際のロボットへ送信し作業を行わせることを目的としています。
本システムを利用することで、MobileHIROを以下の2つのステップで運用することが可能となります。
公開準備中
修正BSDライセンスに基づき配布されます。 詳しくは、LICENSE.txtおよびLICENSE_ja_jp.txtを御覧ください。
東京大学 知能機械情報学専攻 情報システム工学研究室 itngr@jsk.t.u-tokyo.ac.jp
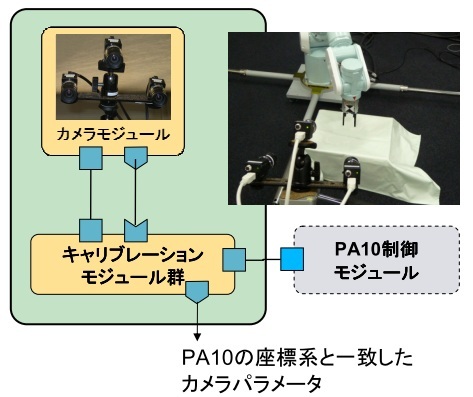
PA10のアームに添付したマーカを環境に固定したカメラで観測することで カメラのキャリブレーションとPA10-カメラ間の座標の一致を同時に行います。
※本RTC群の動作にはステレオ画像取得RTCが必要です。 別途ご用意願います。
利用に際しては対象物体に関する高機能3次元視覚システムVVVの モデルデータが必要になります。 詳細に関しましてはお問い合わせ下さい。
実行ファイルを有償でご提供させて頂きます。 詳しくは、下記へご相談ください。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


MCM4302向けカメラ制御RTC
概要
このコンポーネントは、マイクロビジョン社製USBカメラ(MCM-4302)1台を制御する機能を有する。
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/