RTが販売しているUSB出力9軸IMUセンサモジュールに対応したRTC、及びキャリブレーション用ソフトウェアを作成しました。WindowsとLinuxに対応しています。 詳しくはこのページをご覧ください。
Canon社製のNetworkカメラVB-C50iのRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
OpenRTM.NET OpenRTM.NET-1.0, OpenRTM.NET-1.1に対応。
非営利・非商用での利用に限り、バイナリーファイルにて 無償公開にしています。 商用利用やソースコードの提供に関しましては 下記へご相談ください。
弊社の自社サイトでの公開を予定しています。 詳しくは、下記へご連絡願います。
Canon社製のNetworkカメラVC-C50iのRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
TOKYO KEIKI社製の加速度センサVSAS2のRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
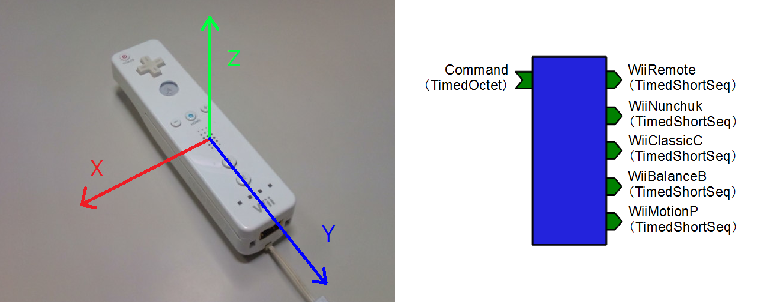
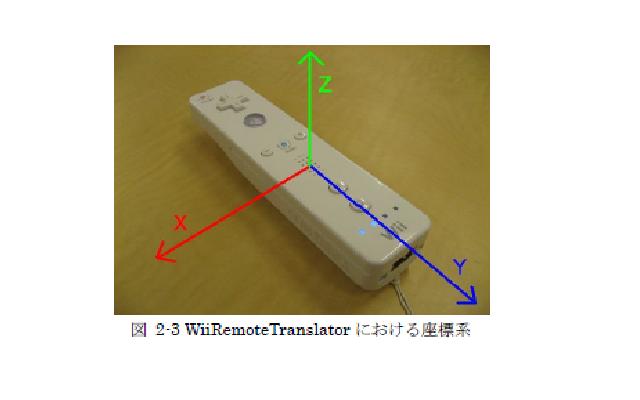
本プログラムは、任天堂株式会社より発売されているWiiリモコンおよび、拡張コントローラ(ヌンチャク、クラシックコントローラ、バランスボード、モーションプラス)の操作、およびデータを送信するコンポーネントです。
Windows7と、VC++2010でのコンパイルと動作確認をしてます。
Wiiリモンコン用のコンポーネントで,ボタンや加速度のデータを 取得できます。また,ヌンチャクやクラシックコントローラなどの 拡張コントローラに対応していますています。
・マイクロソフト株式会社より提供されているWindows 用のデバ イスドライバ開発キット(WDK)のソースコード及びライブラリを 除き,WiiRemoteComponentsの著作権は,芝浦工業大学水川研究室に帰属します。 ・芝浦工業大学水川研究室が著作権を持つRTコンポーネントは,非営利目的での 使用及び改変自由ですが,商用利用の場合は別途ご相談下さい。 なお,本作品を使用して発生した,いかなる損害についても責任を負いません。
ニッタ社製の力覚センサXFS-18M20A10のRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
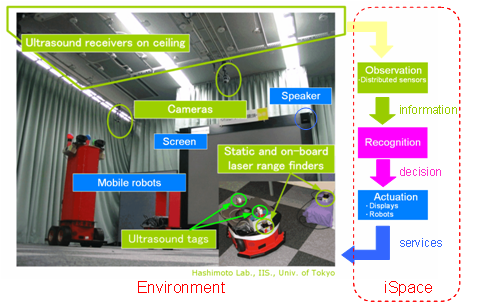
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク






USB出力9軸IMUセンサモジュール
RTが販売しているUSB出力9軸IMUセンサモジュールに対応したRTC、及びキャリブレーション用ソフトウェアを作成しました。WindowsとLinuxに対応しています。 詳しくはこのページをご覧ください。