三菱電機製産業用ロボット(MELFA)の中レベルACT共通インターフェースを提供する。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
三菱電機株式会社 先端技術総合研究所 業務部 技術情報課 http://www.mitsubishielectric.co.jp/corporate/randd/inquiry/index_at.html お問い合わせ窓口 ATC_webmaster@ra.MitsubishiElectric.co.jp
三菱電機製産業用ロボット(MELFA)の低レベルACT共通インターフェースを提供する。
三菱電機株式会社 先端技術総合研究所 業務部 技術情報課 http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html お問い合わせ窓口) ATC_webmaster@ra.MitsubishiElectric.co.jp
本コンポーネント群はOpenHRP3のシミュレータを用いて、車体速度を入力とする対向二輪型の移動ロボットを経路に沿って走行させる移動機能を統合したモジュール群です。
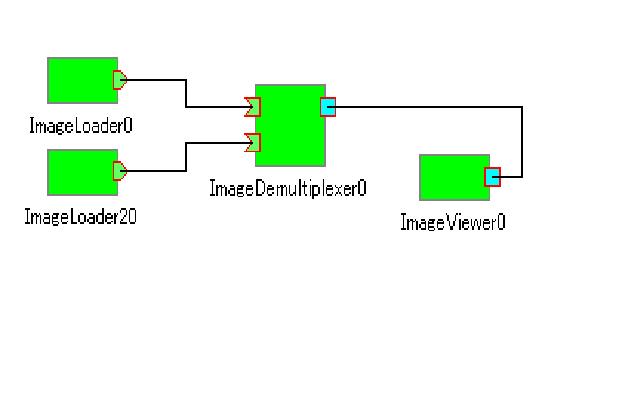
EPBM形式画像データをディスプレイに表示するモジュールです。
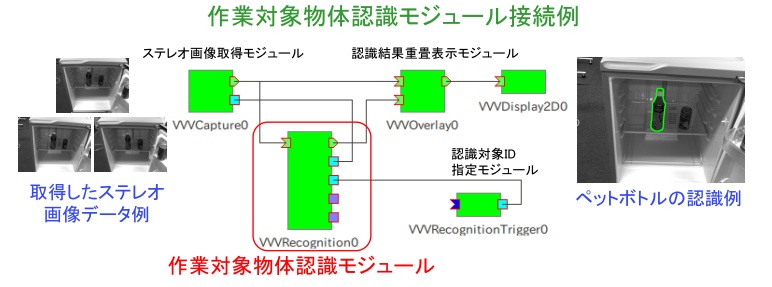
関連モジュール 作業対象物認識モジュール群 ステレオ画像取得RTC 認識結果の重畳表示RTC
利用に際しては高機能3次元視覚システムVVVのキャリブレーションデータが必要になります。 詳細に関しましては下記へお問い合わせ下さい。
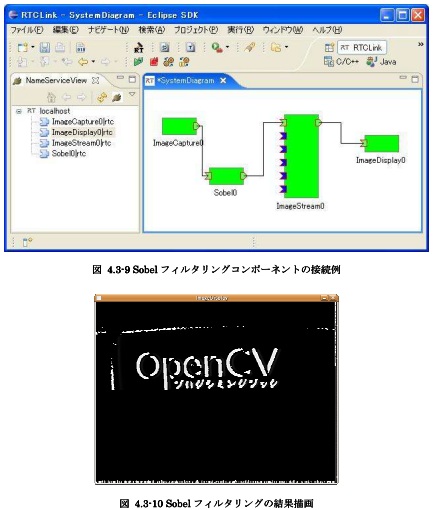
本RTC群は、富士通九州ネットワークテクノロジーズ株式会社から販売されている画像処理モジュール上で動作する画像処理RTC群から出力される画像を表示するものです。
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表します。
株式会社 セック 開発本部 第四開発部(RTミドルウェア担当) 〒158-0097 東京都世田谷区用賀4-10-1 SBSビル Tel :03-5491-4404 Fax :03-5491-4771 URL :http://www.sec.co.jp
RGB-Dセンサを用いたビジュアルベースのオドメトリ取得と、その位置姿勢表示のツールとしてビューワ出力が可能なRTCを公開しています。
ドキュメント詳細は以下のリンク先で公開しています。 http://www1.meijo-u.ac.jp/~kohara/cms/technicalreport/vodom-rtc
画像をJPEGに変換して転送したり,JPEG画像やOpenCV画像を表示 したりするコンポーネント群です。
下記ライブラリを使用しています。 ●OpenCV 1.0.0 ●JPEG変換にIJGのライブラリ
修正BSDライセンスを適用しています。
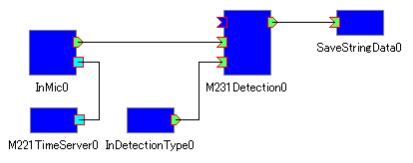
発話区間推定コンポーネントは、入力された音声波形データ/顔特徴点情報を 元に発話区間情報を生成、発話区間情報付き音声波形データを出力します。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しくは、下記までご連絡をお願い致します。
株式会社イーガー 新規事業開発部 次世代ロボット知能化プロジェクト(担当:窪田) 〒530-0047 大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F Tel : 06-6360-2050 Fax : 06-6360-2051 E-mail: kubota@mail.eager.co.jp
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

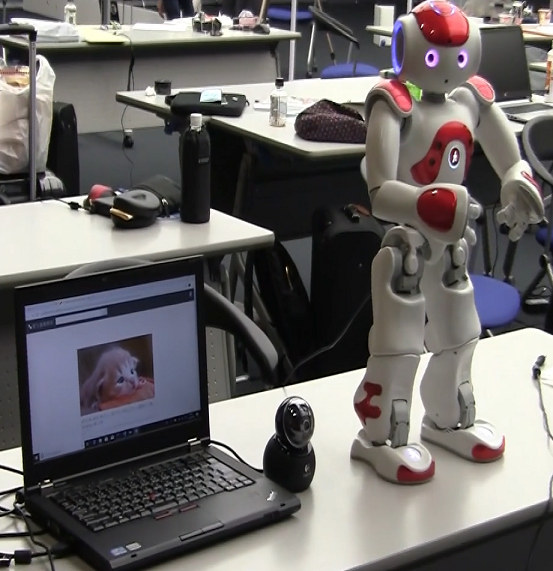
甘えん坊ロボット
概要