東京大学 知能機械情報学専攻 情報システム工学研究室 itngr@jsk.t.u-tokyo.ac.jp
基盤ロボット技術活用型オープンイノベーション促進プロジェクトにて開発した組込み向け軽量RTミドルウェアです。
UNDER CONSTRUCTION ...
このコンポーネントは静止・移動障害物を回避しながら,指定物体を追う 経路を計画するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0
修正BSDライセンスを適用しています。
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
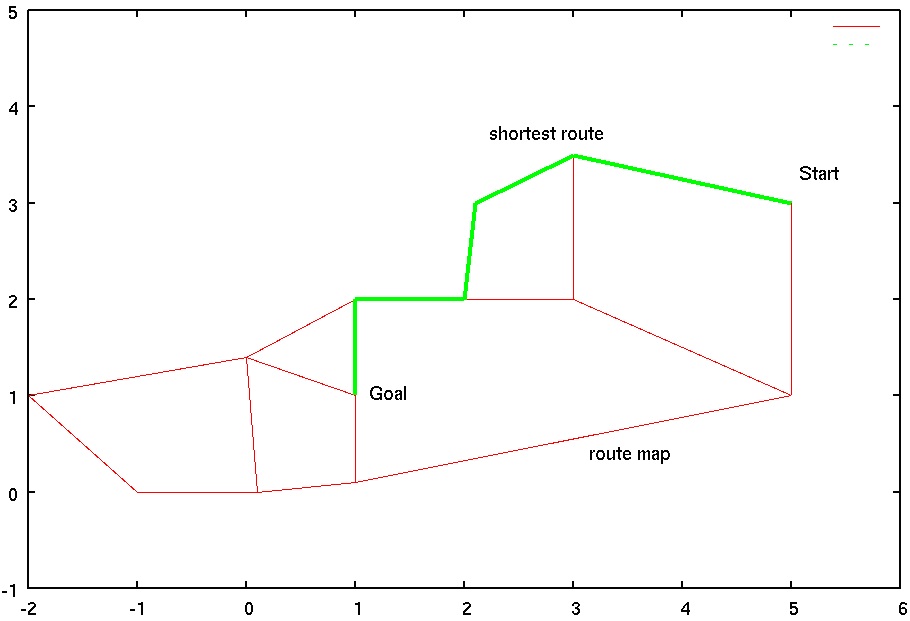
経路地図を用い、現在位置から目標位置までの 最短経路を計算・出力するコンポーネントです。
- PathPlanning 経路計画RTC - PositionInput 目的地入力RTC(デバッグ用) (OpenRTM-aist 1.0.0-RC1 C++)
※インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
BSDライセンス
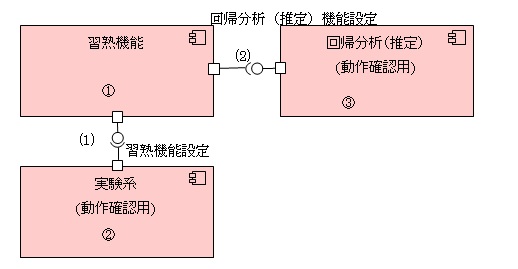
ロボットの動作習熟を効率よく行うためのモジュールです。 実験系の入力に対する応答を2つのクラスに分けて考え それらのクラスの境界を、とるような入力パラメータを 能動的に探索します。 モジュール内部では実験系の学習モデルを作成すると同時に 効率よい学習のための行動計画を構築していきます。 さらにユーザー定義の評価値回帰分析(推定)関数の導入に より、クラスの境界付近で 探索を優先する候補を絞り込む ことが可能となります。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
共通カメラIFに準拠した背景差分による把持対象物認識コンポーネントです.
修正BSDライセンスを適用しています.
3月上旬頃公開予定
奈良先端科学技術大学院大学 情報科学研究科 robotics-staff@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5371, Fax: 0743-72-5379
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として 開発されたことを記し、ここに感謝の意を表する。
本コンポーネントは,特徴点群の3次元フロー認識とモーションセンサ(IMU)の認識の組み合わせにより, 自分自身の位置や回転量を推定しながら,特徴点群をラベリングして他者の位置や移動判定をする コンポーネント群です。
修正BSDライセンスに基づき配布されます。 詳しくは、LICENSE.txtファイルをご覧ください。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

競KOBUKI
概要