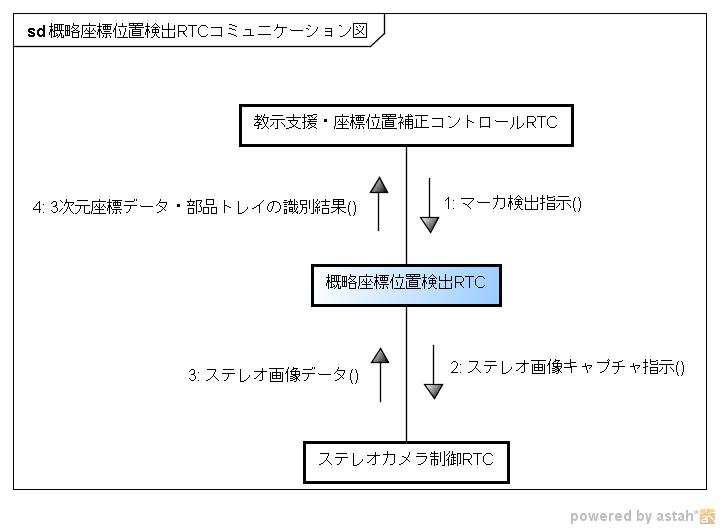
このコンポーネントは、ステレオ画像上より、マーカの座標を検出してマーカ配置パターンを識別する。
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
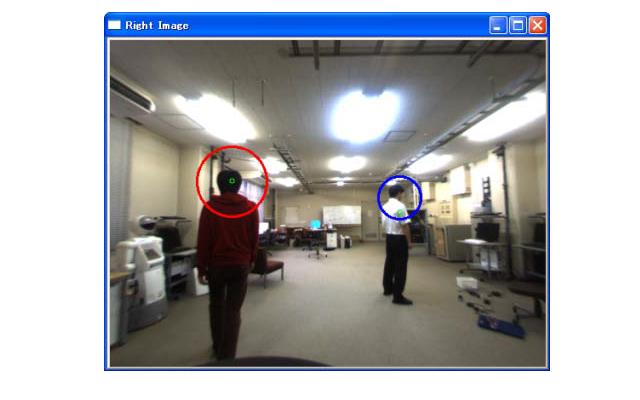
このコンポーネントはステレオカメラ(Bumblebee 2)の情報から人物を 検出し,それぞれの人物の位置と移動速度を出力するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0 ●FlyCapture (配布元:http://www.ptgrey.com/) ●Triclops(配布元:http://www.ptgrey.com/))
修正BSDライセンスを適用しています。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
ステレオカメラキャリブレーションコンポーネント
概要
本コンポーネントは,CameraImage型でステレオカメラの両眼画像を取得し,内部パラメータ,外部パラメータを推定するためのコンポーネントです。
注意事項
以下のパッケージの追加インストールが必要になります。●opencv2.2
●RTMEXTenderが必要です。詳細は
http://www.jsk.t.u-tokyo.ac.jp/~h-yaguchi/rtmext/
を参照してください。
ライセンス
修正BSDライセンスに基づき配布されます。詳しくは、LICENSE.txtファイルをご覧ください。
連絡先
東京大学 知能機械情報学専攻 情報システム工学研究室itngr@jsk.t.u-tokyo.ac.jp