独立行政法人 産業技術総合研究所 e.yoshida@aist.go.jp 〒305-8568 茨城県つくば市梅園1-1-1 つくば中央第2 知能システム研究部門AIST-CNRS ロボット工学連携研究体
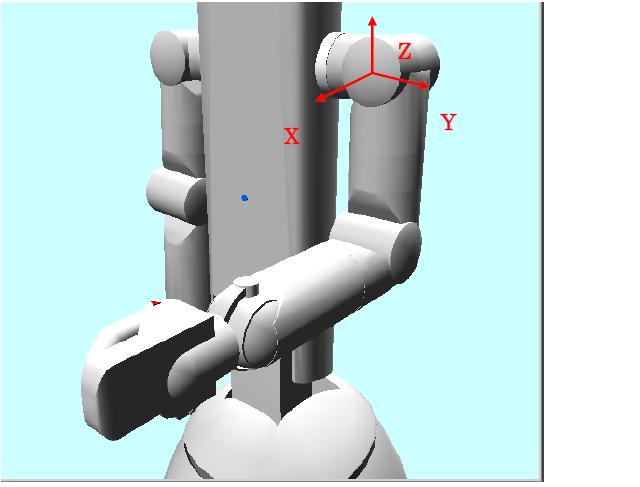
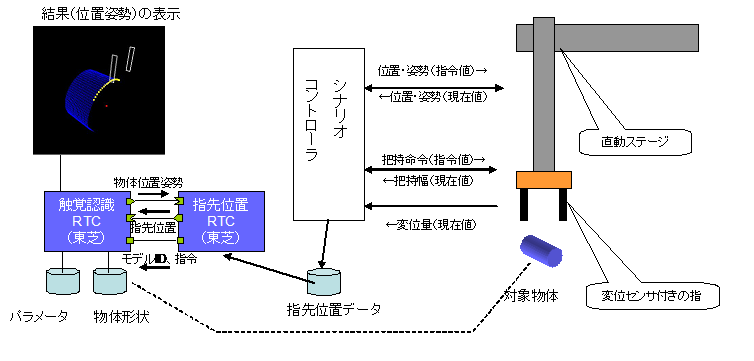
触覚認識モジュールは、変位センサを装備したロボットハンドで 物体(スプーン、缶など)の部分的な形状を測定し、予め登録した 形状データと照合し、その物体の重心位置・姿勢を算出するもの である。
バイナリー提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:atsushi.sugahara@toshiba.co.jp
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
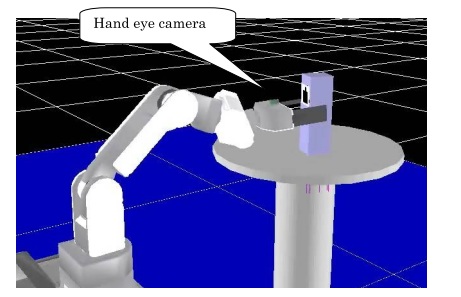
本モジュールは、ハンド・アイ・カメラを搭載したロボットアームに ビジュアルフィードバック動作を行わせるために開発したものである。 ハンド・アイ・カメラで撮影したマーカの画像を基に、マーカの 位置姿勢を算出するRTC「単眼位置姿勢計測・表示モジュール 」がある。 本モジュールは、このモジュールと接続することにより、マーカの位置 姿勢情報を受け、マーカに近づくためのアーム関節角(速度)を算出する ものである。
詳しい内容については、下記へご連絡願います。
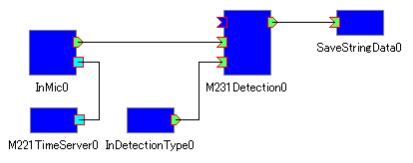
発話区間推定コンポーネントは、入力された音声波形データ/顔特徴点情報を 元に発話区間情報を生成、発話区間情報付き音声波形データを出力します。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しくは、下記までご連絡をお願い致します。
株式会社イーガー 新規事業開発部 次世代ロボット知能化プロジェクト(担当:窪田) 〒530-0047 大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F Tel : 06-6360-2050 Fax : 06-6360-2051 E-mail: kubota@mail.eager.co.jp
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
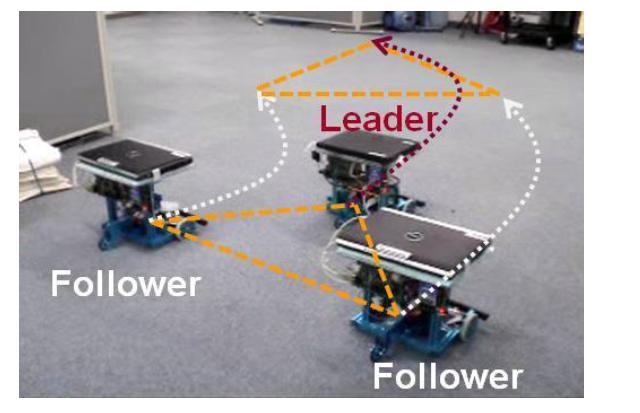

複数台ロボットシミュレータモジュール(オープンソース)
概要
本知能モジュールは,複数台移動ロボットのシミュレーションを行うことができるモジュールです。シミュレータには,Simbad というフリーシミュ
レータを利用しており,本モジュールにその機能が組み込まれています。
注意事項
下記ライブラリを使用しています。●Java3Dライブラリ
http://java.sun.com/javase/technologies/desktop/java3d/index.jsp
●Simbadシミュレータ
http://sourceforge.net/projects/simbad/files/
ライセンス