AGVによる部品運搬とHIROによる物体操作の実行順序を制御して 連携作業を行うモジュール 2012年2月24日にコンポーネント本体とマニュアルをアップロードしました。 2012年3月24日に,バグを修正した状態機械RTCをアップロードしました。
下記ライブラリを使用しています。 ●OpenCV 2.1
修正BSDライセンスを適用しています。
国立大学法人 豊橋技術科学大学 行動知能システム学研究室 〒441-8580 豊橋市天伯町雲雀ヶ丘1-1 email: rtc@aisl.cs.tut.ac.jp
双腕ロボットHiroNXに対してOpenRTM経由で動作コマンドを送るためのインタフェースを提供します。
HiroNXInterface使用説明書
LGPL ver.2.1
http://code.google.com/p/hironx-interface
HIROに搭載されているハンド部のみ(単体で購入)を独立にコンポーネントとして作成。
修正BSDライセンスを適用しています.
3月上旬頃公開予定
筑波大学 大学院システム情報工学研究科 aiyama@esys.tsukuba.ac.jp 〒305-8573 茨城県つくば市天王台1-1-1 Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として 開発されたことを記し、ここに感謝の意を表する。
私たちは各行でロボットの動きの種類とそれのパラメータが含まれるモーションスクリプトを取得し,処理する一つのRTコンポーネントを提案します.本モーションスクリプトは人間にサービスを提供するようHRP-4を制御するために使用する.モーションスクリプトの行は任意の逆運動学の解とモーションプランナーで求められる解法から得られる.実験ではボトルからグラスに水を注ぎ,人に手渡す簡単なサービスを行う.
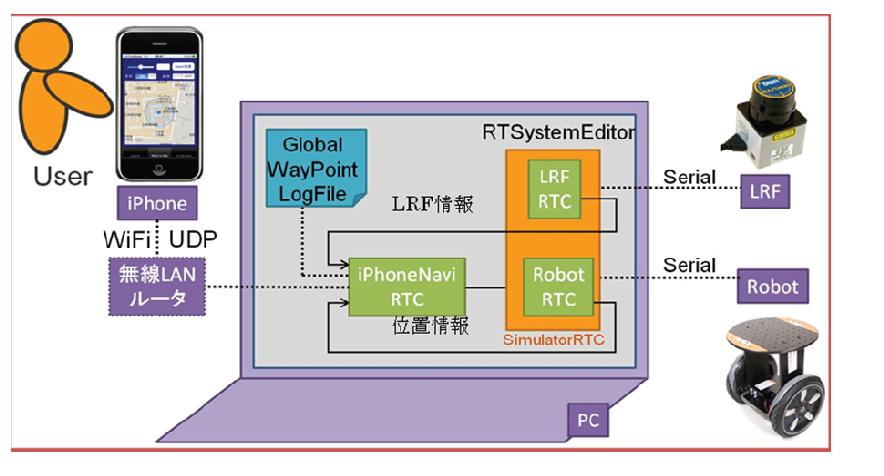
地図上でのナビゲーションについて、比較的広範囲なものと狭い範囲のものに分けて開発を行った。広範囲なものとしては、「GoogleMap」と連携しあらかじめ定めておいた経由点を表示するとともに、速度制約領域と呼ばれる領域の入力を可能にした。狭い範囲での走行についてはロボットから送られてくるLRFデータを表示し、その地図上で目的地点と経由点を入力することができる。さらに、狭い範囲での走行については、地図を見ながらロボットに進ませたい方向にiPhoneを傾けることでロボットの目標速度を出力できるようにした。
SICK社製のLMS100のRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
OpenRTM.NET OpenRTM.NET-1.2.1に対応。
非営利・非商用での利用に限り、バイナリーファイルにて 無償公開にしています。 商用利用やソースコードの提供に関しましては 下記へご相談ください。
弊社の自社サイトでの公開を予定しています。 詳しくは、下記へご連絡願います。
SICK社製のLMS200のRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
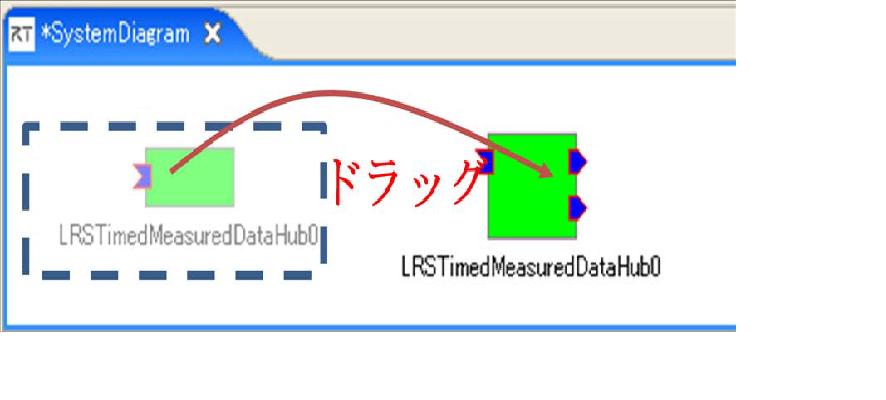
このコンポーネントはLRS Timed Measured Data データを複数に分岐する コンポーネントです。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク



HIRO-AGV統合制御モジュール
概要
AGVによる部品運搬とHIROによる物体操作の実行順序を制御して
連携作業を行うモジュール
2012年2月24日にコンポーネント本体とマニュアルをアップロードしました。
2012年3月24日に,バグを修正した状態機械RTCをアップロードしました。
注意事項
下記ライブラリを使用しています。
●OpenCV 2.1
ライセンス
修正BSDライセンスを適用しています。
連絡先
国立大学法人 豊橋技術科学大学
行動知能システム学研究室
〒441-8580 豊橋市天伯町雲雀ヶ丘1-1
email: rtc@aisl.cs.tut.ac.jp