PosixRealTimeExecutionContextは、Posixライブラリと 標準Linuxリアルタイム機能を利用したリアルタイム対応 実行コンテキストです。 rtc.confのexec_cxt.periodic.rate:で指定した周期で 精度よいRTCの周期実行が可能になります。 ソースを公開していますので、Ubuntu以外のLinuxでも 利用いただけます。 ドキュメントは、モジュール本体ファイルに含まれています。
EPL 1.0
千葉工業大学 未来ロボット技術研究センター(furo) http://www.furo.org/ email:info@furo.org
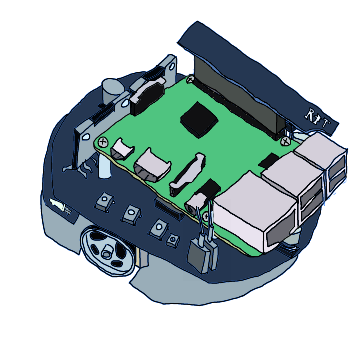
RTが販売しているRaspberry Pi Mouseを制御するためのRTC、RTシステムを作成しました。 詳しくはマニュアルをご覧ください。 RTシステムの動作にはRaspberryPiMouseRTCをインストールしておく必要があります。
概要 シナリオは専用スクリプト言語を使って、コンポーネントの振る舞いを記述したものです。シナリオプレーヤはアプリケーション実行系で、複数コンポーネントの司令塔の役割を果たします。具体的には他のコンポーネントから様々なメッセージを受け取り、その結果他のコンポーネントにメッセージを送出することで、複数のコンポーネントを連携動作させることができます。 シナリオを作成するためのツールとしてシナリオエディタを提供します。コンポーネントの動作や条件判断などの各処理を箱のように見える「部品」として定義し、それらを接続していくことで簡単にアプリケーションを作成することが出来ます。
注意事項 下記ライブラリを利用しています。 log4j-1.2.8.jar
ライセンス Eclipse Public License - Version 1.0
連絡先 日本電気株式会社 robot@rtp.jp.nec.com
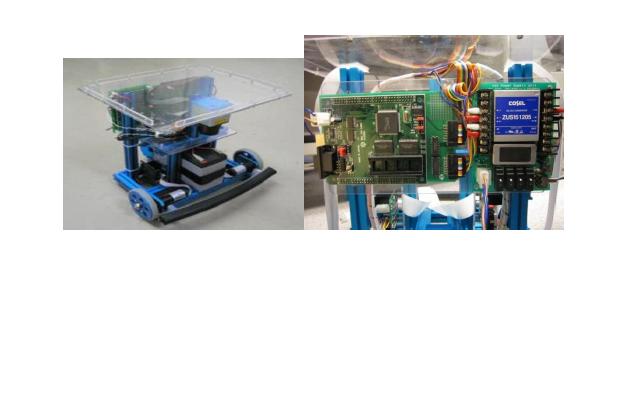
RTC-CANopenを利用する上でのリファレンスとするために開発したロボット(リファレンス ロボット)を操作するモジュール群です。
●リファレンスロボットはテクノクラフト社のBeegoを対象に設計してあります。 ●リファレンスロボットの実行にはRTC-CANopenが必要となります。
・RTC-CANopenリファレンスマニュアルの著作権は,芝浦工業大学水川研究室に 帰属します。 ・これらのコンポーネント群は,非営利目的での使用及び改変自由ですが,商用利用の 場合は別途ご相談下さい。 なお,本モジュール群を使用して発生したいかなる障害についても責任を負いません。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


Posixライブラリと標準Linuxリアルタイム機能を利用した リアルタイム対応実行コンテキスト
概要
PosixRealTimeExecutionContextは、Posixライブラリと
標準Linuxリアルタイム機能を利用したリアルタイム対応
実行コンテキストです。
rtc.confのexec_cxt.periodic.rate:で指定した周期で
精度よいRTCの周期実行が可能になります。
ソースを公開していますので、Ubuntu以外のLinuxでも
利用いただけます。
ドキュメントは、モジュール本体ファイルに含まれています。
ライセンス
EPL 1.0
連絡先
千葉工業大学
未来ロボット技術研究センター(furo)
http://www.furo.org/
email:info@furo.org