Python対話環境において、幾何モデルを用いた動作生成システムを柔軟に構築するための スクリプト群を用いて作られた、作業共通インタフェースに準拠する動作生成モジュールです。 RRT-connectによる双腕の干渉を考慮した動作計画機能を提供します。
北陽電機社製の距離センサClassic-URG(URG-04LX)のRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
Ubuntu InterfaceGuidelineに準拠したデータポートを追加。 Windows ACEをcoilに、ロガーをlog4cxxからOpenRTM標準のロガーに変更しました。 InterfaceGuidelineに準拠したデータポートを追加。 OpenRTM.NET set系のサービスには未対応。 OpenRTM.NET-1.2.1に対応。
非営利・非商用での利用に限り、バイナリーファイルにて 無償公開にしています。 商用利用やソースコードの提供に関しましては 下記へご相談ください。
アームの先端にハンドが取り付けられたロボットシステムに対して、把持計画、動作計画、作業計画などを行う、Choreonoidのプラグイン群です。
Choreonoid
graspPlugin for Choreonoid graspPlugin for Choreonoid インストール手順書 双腕ロボットデモ手順書
LEGO Mindstorms EV3上にRTミドルウェア OpenRTM-aist を搭載し、ロボットプログラミング学習用途に供するための基盤開発環境です。
洞窟での測量は,地理学や地質学的な観点から重要なタスクの一つであり,センサ技術を利用したデジタル化が望まれている一分野である.特に,3 次元距離計測は洞窟内の地図構築や洞窟の形状把握が可能となるため,小型化された計測システムと解析技術の発展が望まれている.そこで,本研究では洞窟内の測量を実現するための計測機器を開発し,RT コンポーネント(RTC)により計測システムを構築することで,容易に洞窟内での計測が可能となるシステム化の有効性を示すコンポーネント群である.
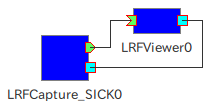
本プログラムはSICK社製LMS200シリーズ用の距離データ取得コンポーネントです。
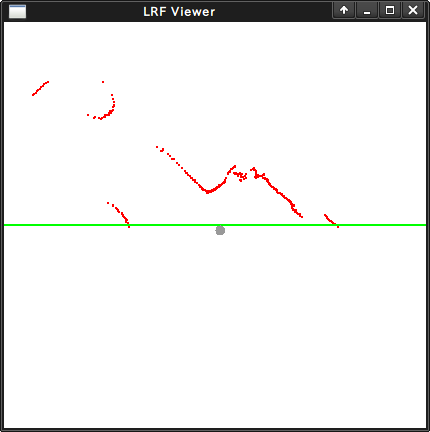
これはLRF描画コンポーネントです。 LRFキャプチャRTCからの距離データを受け取り描画を行います。
※ OpenINVENTの開発は、ver4.0.0をもって終了いたしました。
車輪型移動ロボットが自律的に目的地まで移動できるためには、目的地までの経路を計画し、その経路にそって走行するために車輪の回転を制御し、センサを使って周囲の状況を観測し、自身がどこにいるのかを推定するなどの機能をもつRTC群です。
ロボットシステム(RTシステム)構築用のソフトウェアプラットフォーム「RTミドルウエア」に対応したUMLモデリングツールです。統合開発環境であるEclipse上で動作し、RT機能要素(RTコンポーネント) の設計及び開発を強力にサポートします。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク







(VPython版)HiroNX動作生成モジュール
概要
Python対話環境において、幾何モデルを用いた動作生成システムを柔軟に構築するための
スクリプト群を用いて作られた、作業共通インタフェースに準拠する動作生成モジュールです。
RRT-connectによる双腕の干渉を考慮した動作計画機能を提供します。
関連モジュール