このプロジェクトは機能的に大きく2つに分かれています. 1つはOROCHIの手先に固定したKinectを使用してOROCHI正面に座っている人の顔を検出してOROCHIがその人の顔を追うように動きます. もう1つの機能は,Bluetoothモジュールを備えた車型ロボットの頭部にARマーカーを付け,その上方に設置されたもう一台のKinectを使用して車型のロボットの位置を検出し,ロボットの動きを制御するというものです. 最終的に,OROCHIで検出した顔の輪郭に沿うように車型ロボットが走行することを目標とします.
以下が作成・使用したコンポーネントです
括弧内の文字の説明
・既存:既存のRTCを使用 ・編集:既存のRTCを修正 ・新規:新規に作成したRTC
このコンポーネントは、Point Grey Research社製 IEEE-1394bカメラ (Flea2) 1台を制御する機能を有する。
下記ライブラリを使用しています。 ●FlyCaptureSDK(Point Gray Reserch社製)
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
このプログラムは、株式会社HPIジャパンの人間型ホビーロボットGR001をPCから制御するための プログラムです。
個人的な利用または非商用の利用に限り自由に利用可能としますが、著作権は (独)産業技術研究所 知能システム研究部門 原 功が所有いたします。
また、(独)産業技術総合研究所および原 功は、本プログラムをダウンロード、 インストールまたはご利用いただいた場合に生じたすべての瑕疵およびその使用 結果について一切保証せず、損害賠償も負いません。
GR001サンプルプログラムは、以下の4つのプログラムまたはライブラリから構成 されています。
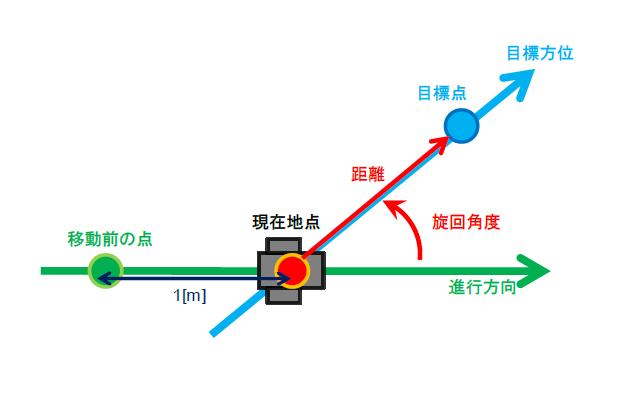
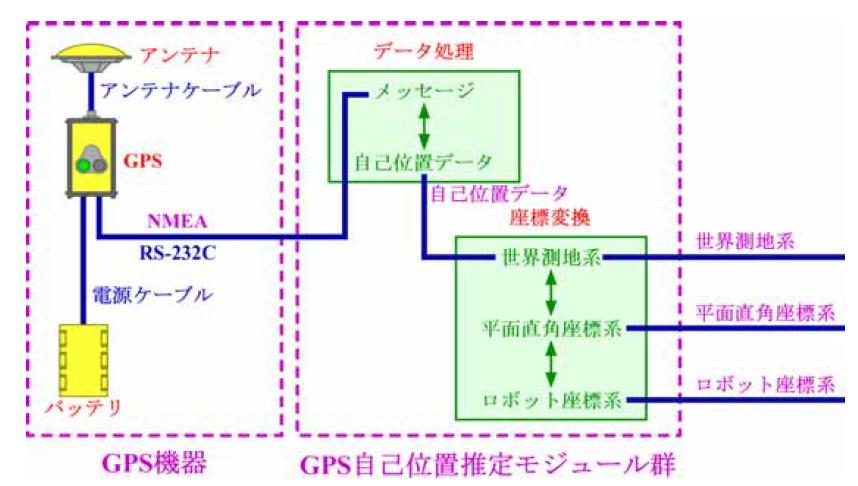
GPSから受信したデータをもとに,ロボットのナビゲーションのために 必要な処理を行うコンポーネントであり,現在地点から目標点への 距離・旋回角度の出力を行います。
・GPSナビゲーションコンポーネントに関する著作権は,芝浦工業 大学ヒューマン・ロボット・インタラクション研究室に帰属します。 ・芝浦工業大学水川研究室が著作権を持つRTコンポーネントは,非営利目的での 使用及び改変自由ですが,商用利用の場合は別途ご相談下さい。 なお,本作品を使用して発生した,いかなる損害についても責任を負いません。
移動ロボットを自律行動させる場合,ロボット自身が自己位置推定および障害物の認識,目的地までの行動計画を行う必要があり,各タスクに応じた作業空間の環境地図を必要な粒度で作成しなければならない.本プロジェクトでは,高精度な自己位置推定のために用いる粒度の細かい占有格子地図から,経路計画に適したグラフ構造により環境を抽象化して表現した地図を作成し,Growing Neural Gasに基づいた地図構築を行うRTCを開発した.本プロジェクトページでは,GNGにより位置情報と占有度情報を含んだトポロジカルマップを構築し,経路コスト算出を行うRTC開発を行い,実機を用いた未知環境における検証実験について提案手法の有効性を示すコンポーネント群である.
AGVによる部品運搬とHIROによる物体操作の実行順序を制御して 連携作業を行うモジュール 2012年2月24日にコンポーネント本体とマニュアルをアップロードしました。 2012年3月24日に,バグを修正した状態機械RTCをアップロードしました。
下記ライブラリを使用しています。 ●OpenCV 2.1
修正BSDライセンスを適用しています。
国立大学法人 豊橋技術科学大学 行動知能システム学研究室 〒441-8580 豊橋市天伯町雲雀ヶ丘1-1 email: rtc@aisl.cs.tut.ac.jp
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

DROCHI
このプロジェクトは機能的に大きく2つに分かれています. 1つはOROCHIの手先に固定したKinectを使用してOROCHI正面に座っている人の顔を検出してOROCHIがその人の顔を追うように動きます. もう1つの機能は,Bluetoothモジュールを備えた車型ロボットの頭部にARマーカーを付け,その上方に設置されたもう一台のKinectを使用して車型のロボットの位置を検出し,ロボットの動きを制御するというものです. 最終的に,OROCHIで検出した顔の輪郭に沿うように車型ロボットが走行することを目標とします.
以下が作成・使用したコンポーネントです
括弧内の文字の説明
・既存:既存のRTCを使用 ・編集:既存のRTCを修正 ・新規:新規に作成したRTC