富士重工業株式会社 エコテクノロジーカンパニー クリーンロボットプロジェクト AdachiY@utu.subaru-fhi.co.jp 〒320-8564 宇都宮市陽南1-1- 11
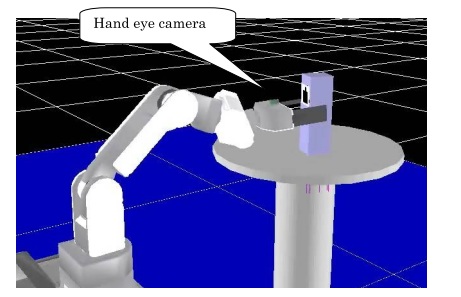
本モジュールは、ハンド・アイ・カメラを搭載したロボットアームに ビジュアルフィードバック動作を行わせるために開発したものである。 ハンド・アイ・カメラで撮影したマーカの画像を基に、マーカの 位置姿勢を算出するRTC「単眼位置姿勢計測・表示モジュール 」がある。 本モジュールは、このモジュールと接続することにより、マーカの位置 姿勢情報を受け、マーカに近づくためのアーム関節角(速度)を算出する ものである。
詳しい内容については、下記へご連絡願います。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:atsushi.sugahara@toshiba.co.jp
富士重工業株式会社 エコテクノロジーカンパニー クリーンロボットプロジェクト
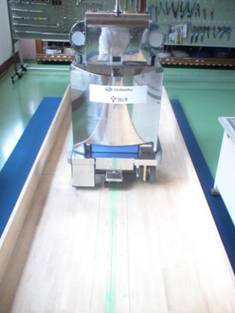
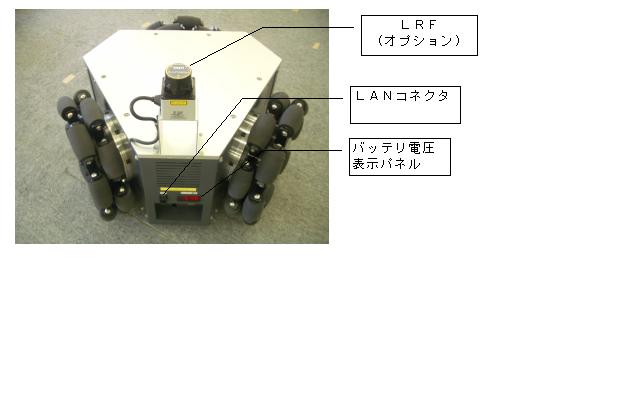
本コンポーネントはActivateすることによって,UDPでブロードキャストされている環境中のロボットの状況を受信し,接続するロボットを選択することが可能である.接続後はTCPによるソケット通信で目標速度・角速度を送信し,オドメトリの値を受信する.
移動ロボットコントローラ「T-Frog」対応のRTコンポーネントです.T-Frogを制御するためのソフトウエアライブラリypspurをRTコンポーネントにまとめました.
移動動作設計ツールはロボットの2次元平面上での移動経路を設計する機能を提供します。
本ツールはEclipseプラグインとC++で記述されたRTコンポーネントで構成されます。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク



発話推定モジュール
概要
口の動きなどから発話しているかどうかを判断するモジュールです。OpenCVを利用しています。OpenCVに接続されているUSBカメラなどの
キャプチャーデバイスから画像を取得し、発話しているかどうかを推定し、
認識結果を出力します。
注意事項
下記ライブラリを使用しています。●OpenCV 1.0
ライセンス
EPLライセンスを適用します。連絡先
九州工業大学情報工学研究院生命情報工学研究系ohashi@bio.kyutech.ac.jp
TEL/FAX 0948-29-7821/7801
Download