RT-Component
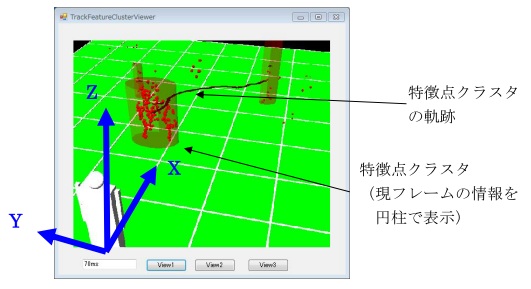
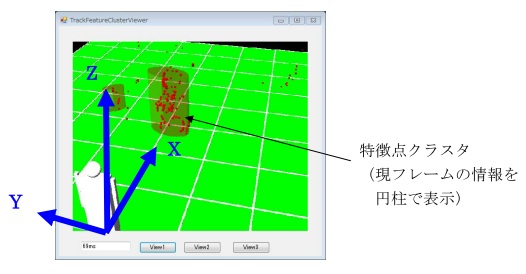
コーナー、エッジの特徴点のクラスタリングを行い そのクラスタの追跡を行なう。 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」上で動作します。
ステレオビジョンモジュール購入者に無償提供致します。 下記URLのステレオビジョンモジュール ソフトウェア提供依頼フォームよりご依頼ください。
コーナー、エッジの特徴点のクラスタリングを行い 3次元位置を計測するコンポーネント 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」上で動作します。
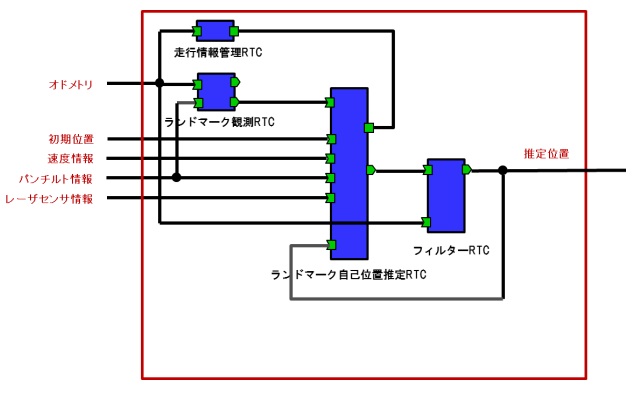
レイアウト地図とランドマーク地図を利用した自己位置推定モジュール群です。 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」とWindows PCが必要です。
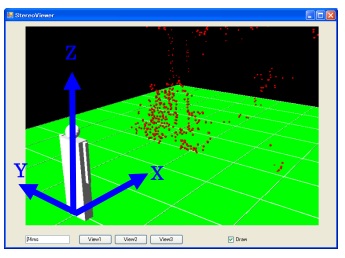
160x120のステレオ画像から各画素の3次元位置を計測するRTコンポーネント 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」上で動作します。
特徴点の3次元計測と顔検出を実行するRTコンポーネント。 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」上で動作します。
画像内から特徴点を抽出し、3次元位置を計測するRTコンポーネント 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」上で動作します。
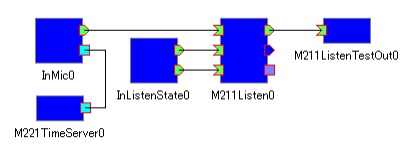
発話区間推定コンポーネントは、入力された音声波形データ/顔特徴点情報を 元に発話区間情報を生成、発話区間情報付き音声波形データを出力します。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しくは、下記までご連絡をお願い致します。
株式会社イーガー 新規事業開発部 次世代ロボット知能化プロジェクト(担当:窪田) 〒530-0047 大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F Tel : 06-6360-2050 Fax : 06-6360-2051 E-mail: kubota@mail.eager.co.jp
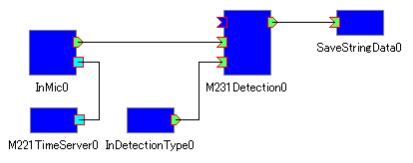
音声認識コンポーネントは入力された音声波形データを認識し 文字列で発話内容を出力します。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

人発見モジュール(LRF)
概要
本プログラムはLRFセンサからの情報を基にした対人追従コンポーネントです。GLによるLRF描写画面上の四角い枠を,マウスドラック(右クリック)の状態で
追従したい対象上に移動させると対象を追従します。
ロボット(センサ)を用いたローカル座標系での対象の座標([m]単位)を出力します。
対象を見失った場合visionからの追従結果を利用して再度追従を試みます。
その場合入力に出力と同型の座標データをつなげてください。
出力の型は自己定義のTimedXYDouble,TimedOdometryなどを使用しています。
ご利用の際はご注意ください。
ライセンス
修正BSDライセンスを適用しています。詳しくは、ご連絡をお願い致します。
連絡先
東京理科大学大学院理工学研究科 機械工学専攻 溝口研究室
〒278-8510 千葉県野田市山崎2641
Tel:04-7124-150