RT-Component
本システムは、電気通信大学知能システム学講座に設置されている エアホッケーロボットを使った対戦アルゴリズム開発を促進するものであり、 以下の4つのコンポーネントで構成されています。
これらのコンポーネント群を利用して対戦アルゴリズムRTCを作成することで、 対戦アルゴリズムの開発や比較検証を容易に行うことができます。
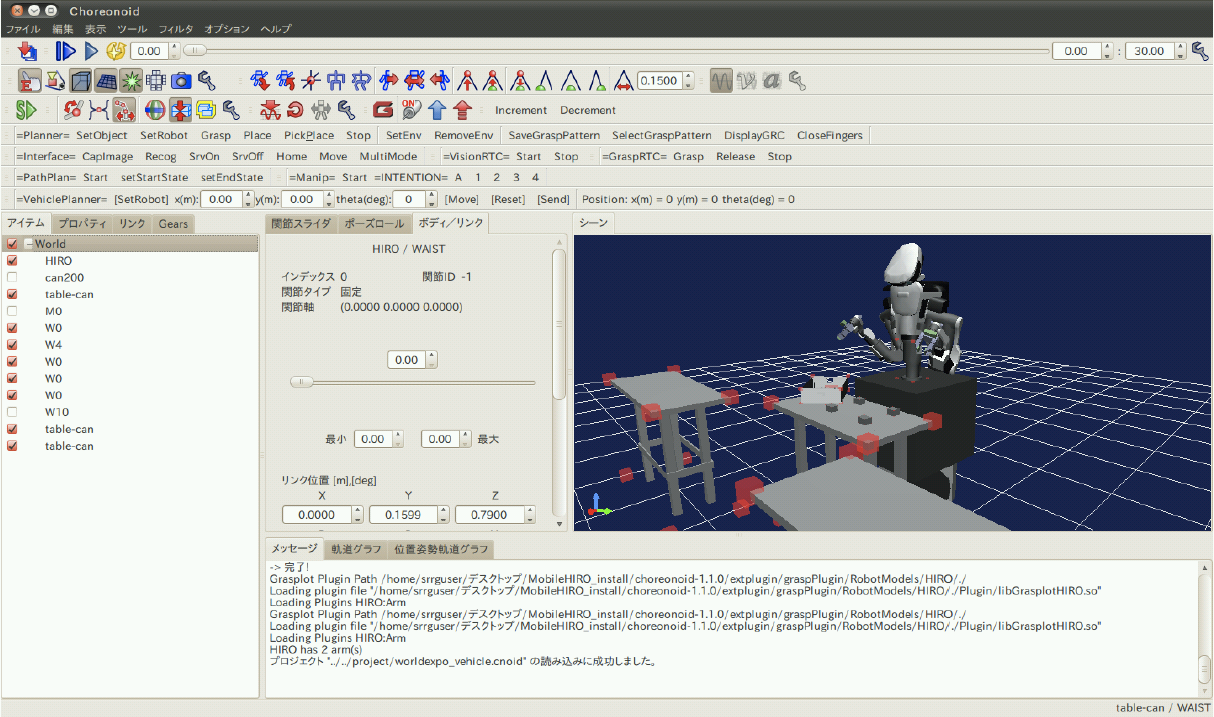
MobileHIRO操作用統合環境は移動型双腕ロボットMobileHIROを実機およびシミュレータ(Choreonoid)上で動作させるための統合環境です。
この統合環境では、移動型双腕ロボットMobileHIROの移動・把持動作の計画作成を行い、計画に基づいた指令を実際のロボットへ送信し作業を行わせることを目的としています。
本システムを利用することで、MobileHIROを以下の2つのステップで運用することが可能となります。
公開準備中
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
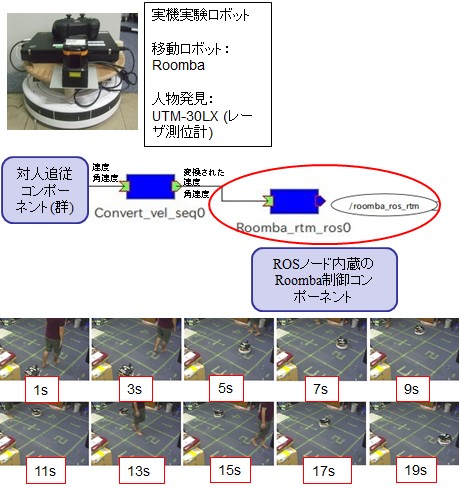





Recovery_Function_of_Target_Disappearance_for_Human_Following_Robot
概要
特徴
仕様
コンポーネント群
ソースコード