HIROに搭載されているハンド部のみ(単体で購入)を独立にコンポーネントとして作成。
修正BSDライセンスを適用しています.
3月上旬頃公開予定
筑波大学 大学院システム情報工学研究科 aiyama@esys.tsukuba.ac.jp 〒305-8573 茨城県つくば市天王台1-1-1 Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として 開発されたことを記し、ここに感謝の意を表する。
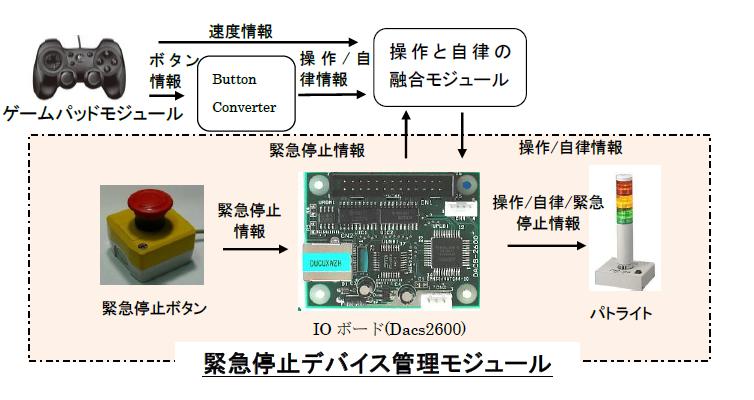
2台の中レベルコンポーネントの干渉回避を行う。 現在のバージョンでは共通作業領域の利用許可フラグを用いて 一台のみ進入を許している。
タスクレベルコマンド(菓子Aをトレイの真中へ,等)を 中レベルコマンド(A1点へ移動,ハンドを閉じる,等)へ 書き下して中レベルコンポーネントへ送る
本システムは双腕ロボットを用いて工場での部品整理をイメージしたサービスを行うシステムである。 具体的には、作業台に置かれた部品を状況に応じて再配置し、個々の部品を検出して 双腕を活かして箱に整理して入れ、双腕で別の場所に運ぶPick&Place作業を行うものである。 システムソフトウェアは頭部ステレオカメラによる部品認識・双腕ロボットでの作業計画・ロボット動作を 行うための RTC 群で構成される。
双腕ロボットHiroNXに対してOpenRTM経由で動作コマンドを送るためのインタフェースを提供します。
HiroNXInterface使用説明書
LGPL ver.2.1
http://code.google.com/p/hironx-interface
アームの先端にハンドが取り付けられたロボットシステムに対して、把持計画、動作計画、作業計画などを行う、Choreonoidのプラグイン群です。
Choreonoid
graspPlugin for Choreonoid graspPlugin for Choreonoid インストール手順書 双腕ロボットデモ手順書
独立行政法人 産業技術総合研究所 e.yoshida@aist.go.jp 〒305-8568 茨城県つくば市梅園1-1-1 つくば中央第2 知能システム研究部門AIST-CNRS ロボット工学連携研究体
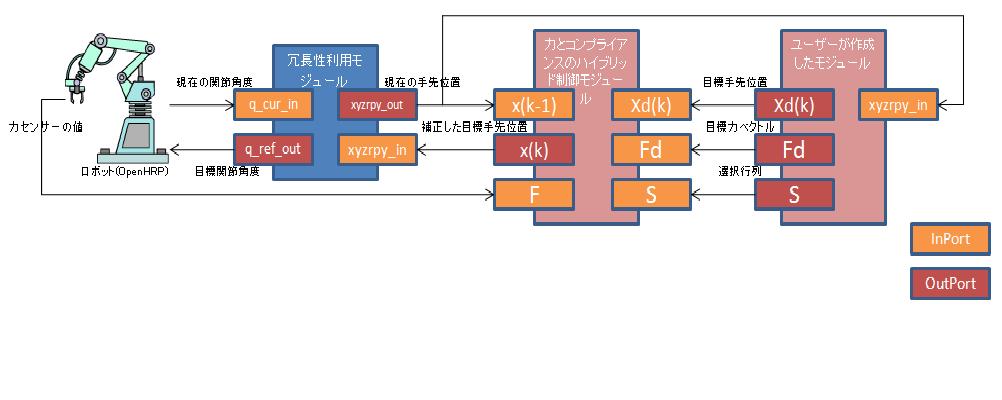
本モジュールは、ロボットのモデル、作業対象物のモデルから運動学を解き、 現在受けている外力から拘束面を推定し、拘束力を一定にしつつ指定された 目標位置にもっとも近くなる目標角度偏差を出力するモジュールです。
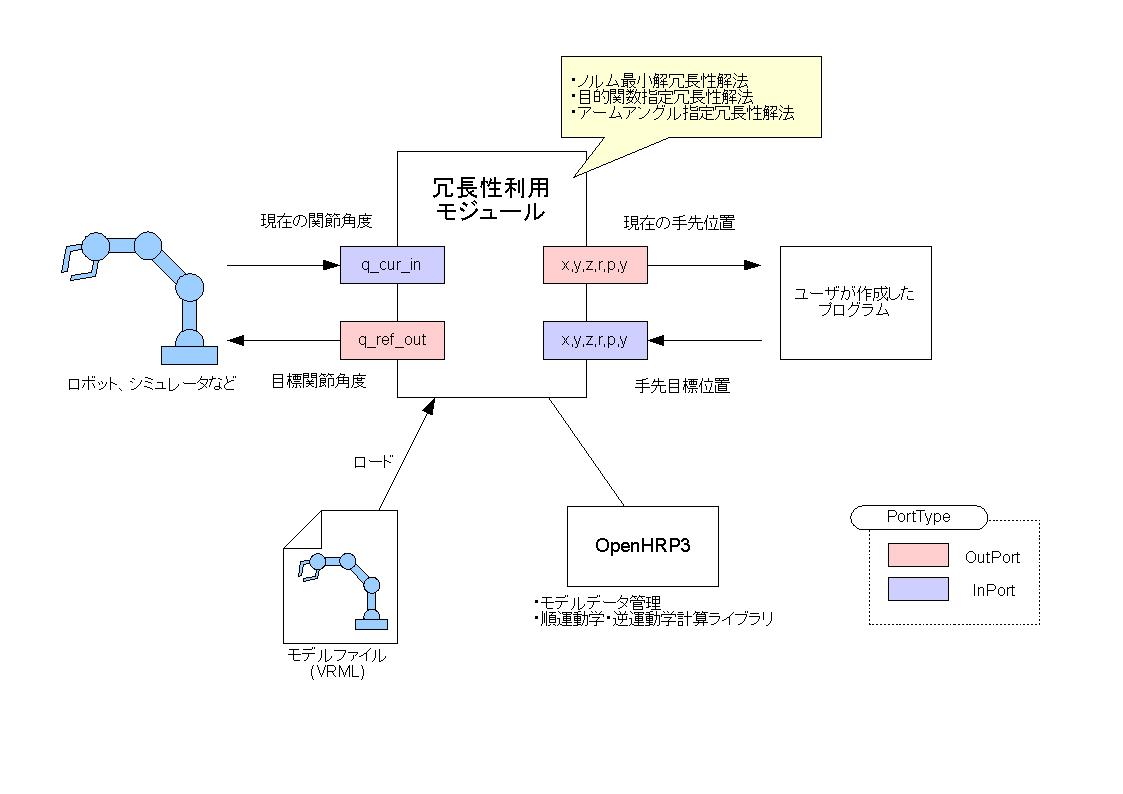
本モジュールは、冗長性を持つロボットアームにおいて、ユーザが指定する 手法で冗長自由度を決定し、現在位置との偏差を出力するコンポーネント です。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク



Hiroハンド
概要
HIROに搭載されているハンド部のみ(単体で購入)を独立にコンポーネントとして作成。
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
3月上旬頃公開予定
連絡先
筑波大学 大学院システム情報工学研究科
aiyama@esys.tsukuba.ac.jp
〒305-8573 茨城県つくば市天王台1-1-1
Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。