作業エラーの発生傾向分析のために、ベイジアンネットワークを 利用した確率計算機能を提供する。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
三菱電機株式会社 先端技術総合研究所 業務部 技術情報課 http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html お問い合わせ窓口) ATC_webmaster@ra.MitsubishiElectric.co.jp
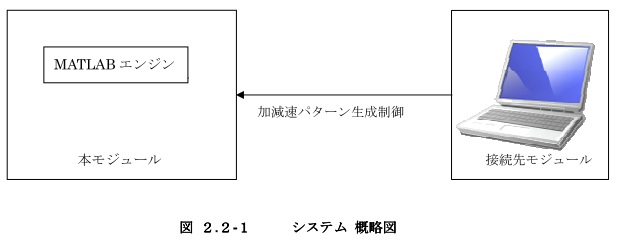
水平2関節ロボットアームの台形則加減速パターンを整形して停止時の 残留振動を抑制する加減速パターンを生成する。
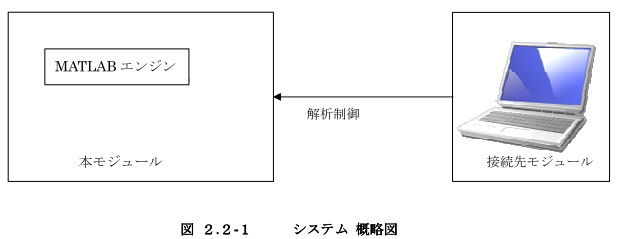
押し操作の準静的解析に基づいたロボットハンドの把持解析を行うための RTCサービスポートを提供する。把持解析では、摩擦のある水平面上に 置かれた対象物体を複数の指で押した際の指の動きから、対象物体の動き を求める。
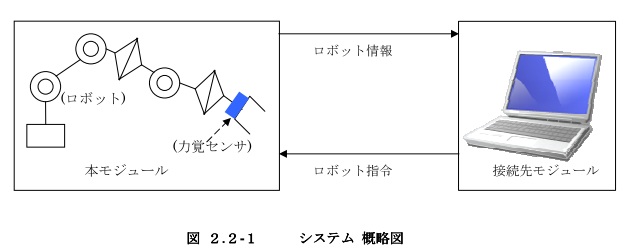
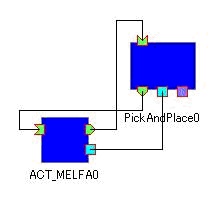
三菱電機産業用ロボット(MELFA)とニッタ製力覚センサの協調動作を 制御するためのRTC入出力ポートを提供する。
三菱電機製産業用ロボット(MELFA)の中レベルACT共通インターフェースを提供する。
三菱電機株式会社 先端技術総合研究所 業務部 技術情報課 http://www.mitsubishielectric.co.jp/corporate/randd/inquiry/index_at.html お問い合わせ窓口 ATC_webmaster@ra.MitsubishiElectric.co.jp
三菱電機製産業用ロボット(MELFA)の低レベルACT共通インターフェースを提供する。
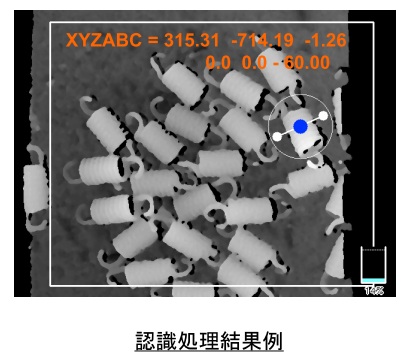
アクティブパターン投光型3次元レンジファインダー(三菱電機(株)Micro3D) センサーに対応して3次元情報及び濃淡画像情報を用いて部品ピッキングのための 物体認識処理を行うモジュールです。
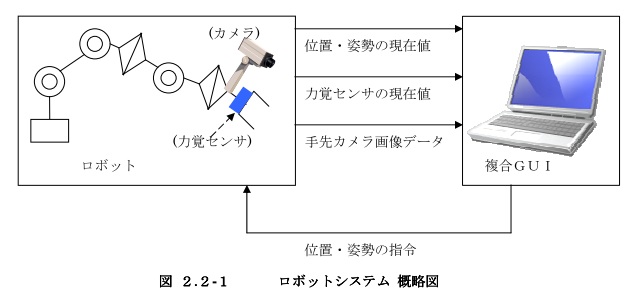
MultiGUI_RTCは複合情報GUIモジュールです。 ロボットの動作状態の適切な可視化によって,教示作業,特に設備や組立部品の 現物に合わせて追加・修正する作業パスの精密化作業の効率化を図ります。
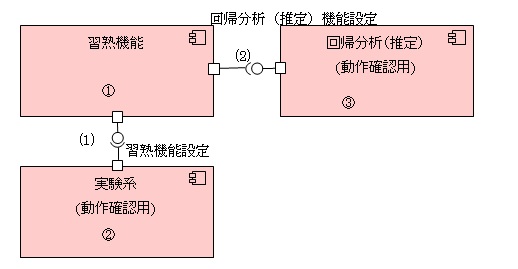
ロボットの動作習熟を効率よく行うためのモジュールです。 実験系の入力に対する応答を2つのクラスに分けて考え それらのクラスの境界を、とるような入力パラメータを 能動的に探索します。 モジュール内部では実験系の学習モデルを作成すると同時に 効率よい学習のための行動計画を構築していきます。 さらにユーザー定義の評価値回帰分析(推定)関数の導入に より、クラスの境界付近で 探索を優先する候補を絞り込む ことが可能となります。
ロボットの教示作業をカメラ画像を見ながら対話的に行う用途を想定し 画面上で指示されたポイント、領域に対応する3次元距離データを利用して 各種データ出力を行います。 入力されたビットマップ画像、3次元距離データを利用して、下記の処理を行い その結果画像(ビットマップ)、および結果データを出力するモジュールです。 ・法線方向算出 ・水平方向目標位置算出 ・深さ算出
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
作業エラー処理モジュール
概要
作業エラーの発生傾向分析のために、ベイジアンネットワークを
利用した確率計算機能を提供する。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
三菱電機株式会社
先端技術総合研究所 業務部 技術情報課
http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html
お問い合わせ窓口)
ATC_webmaster@ra.MitsubishiElectric.co.jp