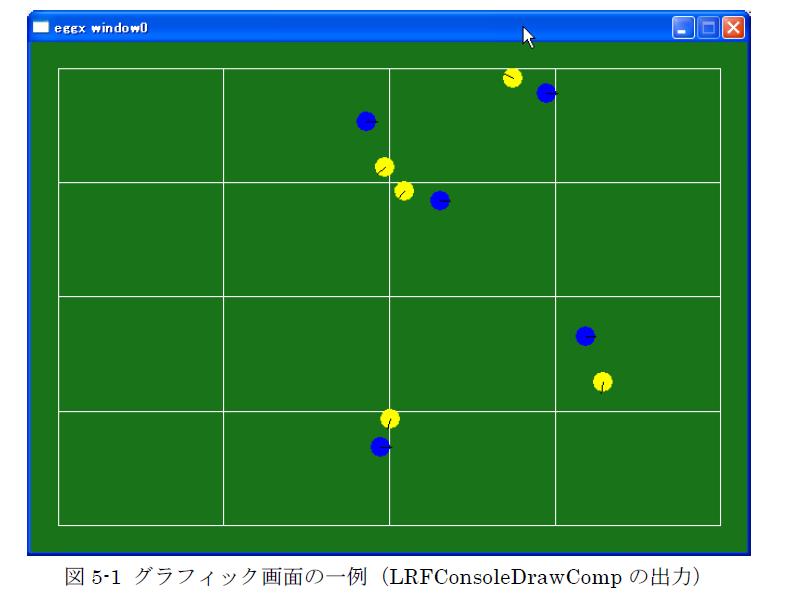
障害物の運動推定を行なうコンポーネントです。 障害物の運動推定コンポーネントの動作を確認するために,円運動をする 模擬的な障害物の位置情報を出力するコンポーネントと運動推定コンポー ネントの入力と出力を二次元座標上に描画するコンポーネントと組み合わせて 実行します。
商用以外の利用の場合、EPLライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
大阪電気通信大学 総合情報学部 メディアコンピュータシステム学科 升谷 保博 E-MAIL: masutani@isc.osakac.ac.jp 〒575-0063 大阪府四條畷市清滝1130-70 TEL&FAX: 072-876-5107
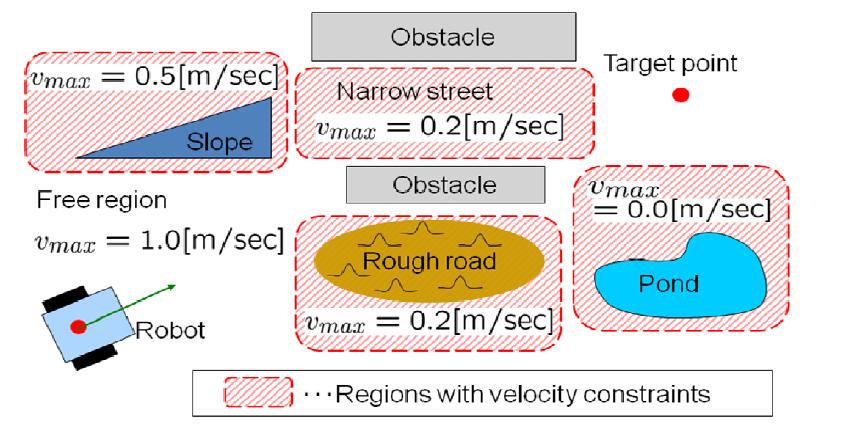
二次元平面とみなせる環境において,何らかの手段により実時間で環境情報が取得できるという前提の下, 移動ロボットが障害物に接触することなく,目的地へ到着するための速度指令を生成するモジュールです。 登録するコンポーネントをテストするための簡単なコンポーネントとシミュレータも含まれています。
※オブジェクト、およびドキュメントは以下のURLから入手できます。
修正BSDライセンスを適用しています。
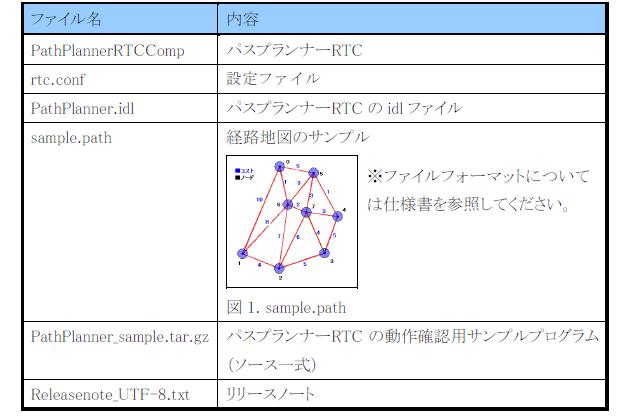
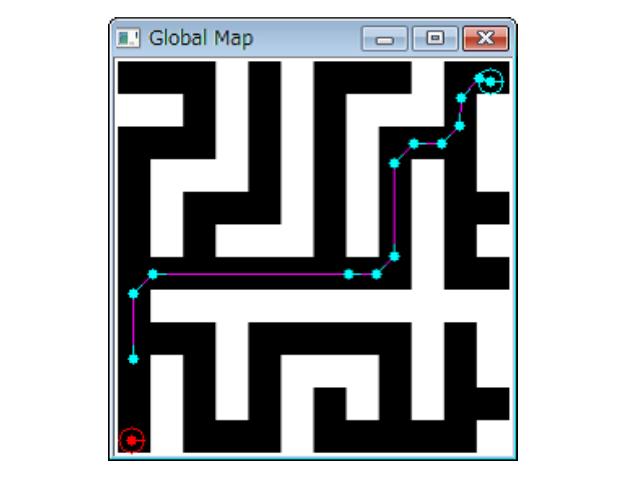
大域経路計画RTCは、指定された開始位置から目的地位置へのロボットの 移動経路を計算し出力するコンポーネント群です。 次のコンポーネントにより構成されています。 ・GlobalPathPlanner コンポーネント ・GlobalMapLoader コンポーネント ・GlobalMapViewer コンポーネント ・Dummy2PosesSender コンポーネント ・MessageReceiver コンポーネント
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
作業計画モジュール
概要
サービスポートやデータポートを持つ様々なモジュールと接続できるようにカスタマイズされた作業計画モジュール、SDLEngineと呼ぶモジュールを容易に作成できるモジュールです。
この SDLEngine を用いると、Javaとほぼ同等のインタプリタである BeanShell のコンソール
から利用できるようになります。
このため、モジュールを使用するアプリケーションを記述したスクリプトを読み込んで、
モジュール間の接続からアクティベーションを行い、それらのモジュールを制御することが
できます。
ライセンス
EPLライセンスを適用します。連絡先
九州工業大学情報工学研究院生命情報工学研究系ohashi@bio.kyutech.ac.jp
TEL/FAX 0948-29-7821/7801
Download