EPBM形式画像データをディスプレイに表示するモジュールです。
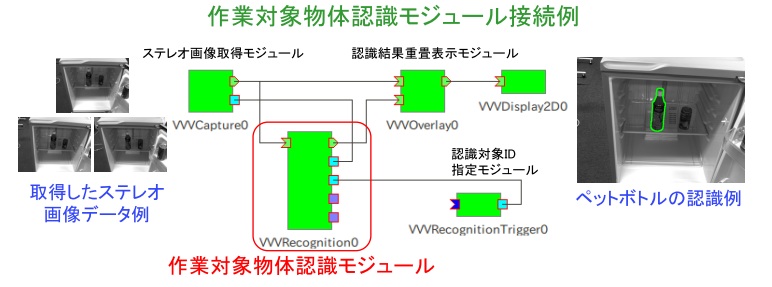
関連モジュール 作業対象物認識モジュール群 ステレオ画像取得RTC 認識結果の重畳表示RTC
利用に際しては高機能3次元視覚システムVVVのキャリブレーションデータが必要になります。 詳細に関しましては下記へお問い合わせ下さい。
計算機に接続された複数のカメラを用いて、産総研VVV形式に基づく ステレオ画像データを作成し出力するモジュールです。
関連モジュール 作業対象物認識モジュール群 認識結果の重畳表示RTC 画像データの表示RTC
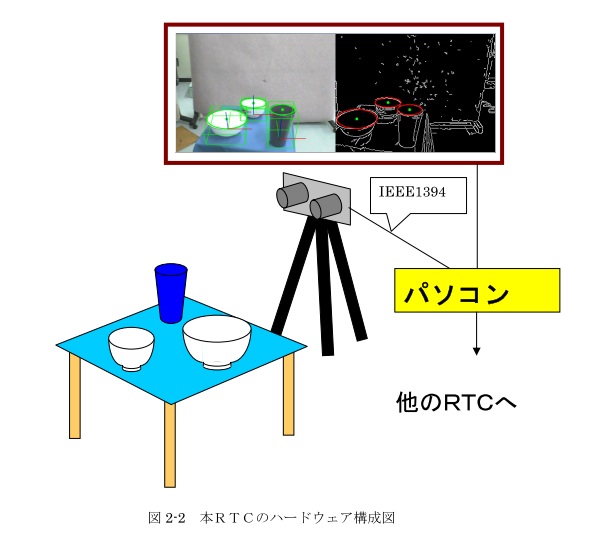
本コンポーネントは、共通Sense I/Fを備えた画像認識コンポーネントで ステレオカメラで物体(皿やコップ)の円弧(楕円)を検出し 予め登録した半径データと照合して、その位置・姿勢を算出するものである。 同時に複数の楕円を認識でき、算出した位置・姿勢をワイヤーフレームで 実写画像に重畳して表示することができる。
バイナリーを無償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:atsushi.sugahara@toshiba.co.jp
全方位移動搭乗型ロボットを制御するためのコンポーネントです。 主な機能としては、速度指令を入力として搭乗型ロボットをその速度指令通り 走行するように制御します。 また、デットレコリングにより自己位置を出力します。 ドキュメントは、モジュール本体ファイルに含まれています。
・オープンソースにて公開 ・PeakSystem社CAN-USBインターフェースに対応 ・Ubuntu 10.04に対応
EPL 1.0
千葉工業大学 未来ロボット技術研究センター(furo) http://www.furo.org/ email:info@furo.org
市販ゲームパッド用のRTCです。 ボタンON,OFFやスティックの値を出力します。 また、ゲームバッドの操作に合わせて IIS::TimedVelocity形式の速度指令を出力します。
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
顔動作推定コンポーネントは入力された動画(連続した静止画)から 人物の顔を検出し、顔の向き、視線、目口開閉度を出力します。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しくは、下記までご連絡をお願い致します。
株式会社イーガー 新規事業開発部 次世代ロボット知能化プロジェクト(担当:窪田) 〒530-0047 大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F Tel : 06-6360-2050 Fax : 06-6360-2051 E-mail: kubota@mail.eager.co.jp
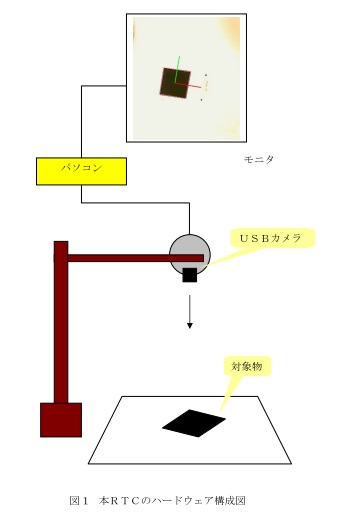
単眼のUSBカメラを使って、多角形マーカの画像を撮影し その位置・姿勢を計測し表示するモジュールである。 マーカとして、四角形、六角形、凸形、凹形を用意した。 位置・姿勢出力は、センス系統一IFに準拠したものであり ロボットアームをコントロールする相対位置決めモジュールと連結できる。 表示には、マーカの実写画像に姿勢ベクトルのCG画を重畳させたり ロボットの手先方向を表示させたりする機能を設けた。
対話に必要な身振り・仕草を、ロボットの発話に同期させて出力するRTCです。 特徴1:ロボットの発話内容と共に、指差しなどのジェスチャを 「動作指令スクリプト」で記述。 特徴2:動作指令スクリプトに記述された動作をロボット制御RTCに出力。 ロボット非依存の動作を実現。 (本パッケージには、ロボット制御RTCの外部仕様書とダミーRTCも含まれます。) 特徴3:音声合成RTCを接続することで、動作に同期した発話を実現。
北陽電機社製のTop-URG(UTM-30LX)のRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
Ubuntu InterfaceGuidelineに準拠したデータポートを追加。 Windows ACEをcoilに、ロガーをlog4cxxからOpenRTM標準のロガーに変更しました。 InterfaceGuidelineに準拠したデータポートを追加。 OpenRTM.NET set系のサービスには未対応。 OpenRTM.NET-1.2.1に対応。
非営利・非商用での利用に限り、バイナリーファイルにて 無償公開にしています。 商用利用やソースコードの提供に関しましては 下記へご相談ください。
PosixRealTimeExecutionContextは、Posixライブラリと 標準Linuxリアルタイム機能を利用したリアルタイム対応 実行コンテキストです。 rtc.confのexec_cxt.periodic.rate:で指定した周期で 精度よいRTCの周期実行が可能になります。 ソースを公開していますので、Ubuntu以外のLinuxでも 利用いただけます。 ドキュメントは、モジュール本体ファイルに含まれています。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


画像データの表示RTC
概要
EPBM形式画像データをディスプレイに表示するモジュールです。
関連モジュール
作業対象物認識モジュール群
ステレオ画像取得RTC
認識結果の重畳表示RTC
注意事項
利用に際しては高機能3次元視覚システムVVVのキャリブレーションデータが必要になります。
詳細に関しましては下記へお問い合わせ下さい。