様々な入力データに対し、必要に応じた処理を行うことが可能な汎用演算コンポーネント
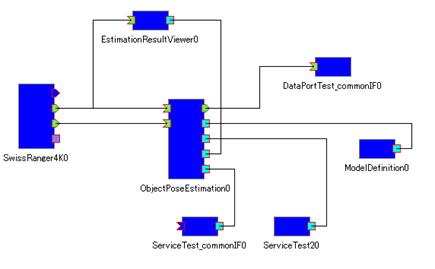
このコンポーネントはスイス MESA社製の3次元距離測定カメラ SwissRanger SR4000からのデータを基に机上の複数個の直方体物体と円筒物体の3次元空間上での位置と姿勢を推定するコンポーネントです。 2012年2月22日にコンポーネント本体とマニュアルを更新しました。
下記ライブラリを使用しています。 ●OpenCV 2.1
修正BSDライセンスを適用しています。
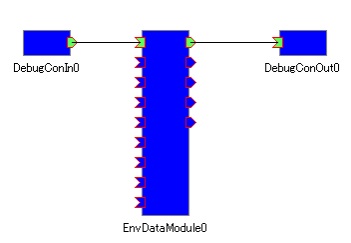
各種センサからのセンサデータや、外部RTCモジュールより得られた 環境データを統合し、上位層モジュールの要求に応じて出力する。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しくは、下記までご連絡をお願い致します。
株式会社 国際電気通信基礎研究所 知能ロボティクス研究所 次世代ロボット知能化プロジェクト担当 〒619-0288 京都府相楽群精華町光台2-2-2 URL :http://www.irc.atr.jp/ptRTM/RTM-j.html email:irc-contact@atr.jp
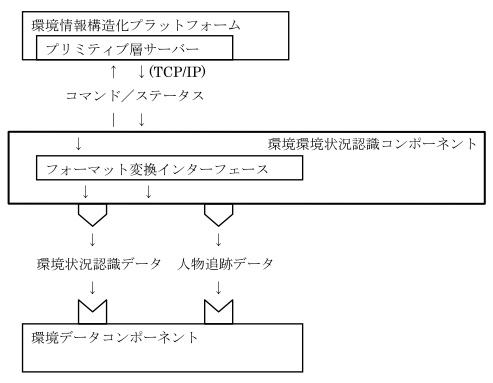
環境情報入力コンポーネントは、環境情報構造化プラットフォームに接続し、データ要求コマンドを 送信して、サーバからのデータを受信します。 また、受信したデータを外部コンポーネントへ出力します。
環境情報構造化プラットフォームに接続しますが、その詳細については次のURLを参照ください。 ●環境情報構造化プラットフォーム : http://www.irc.atr.jp/ptStructEnv/index-j.html
環境情報構造化プラットフォームから得られる、人々とロボットの位置や 「ロボットに近づく」「ロボットから離れる」「ある程度の時間以上ロボットの 近傍にいた人物が離れる」などの状況の認識結果を、外部RTCに出力します。
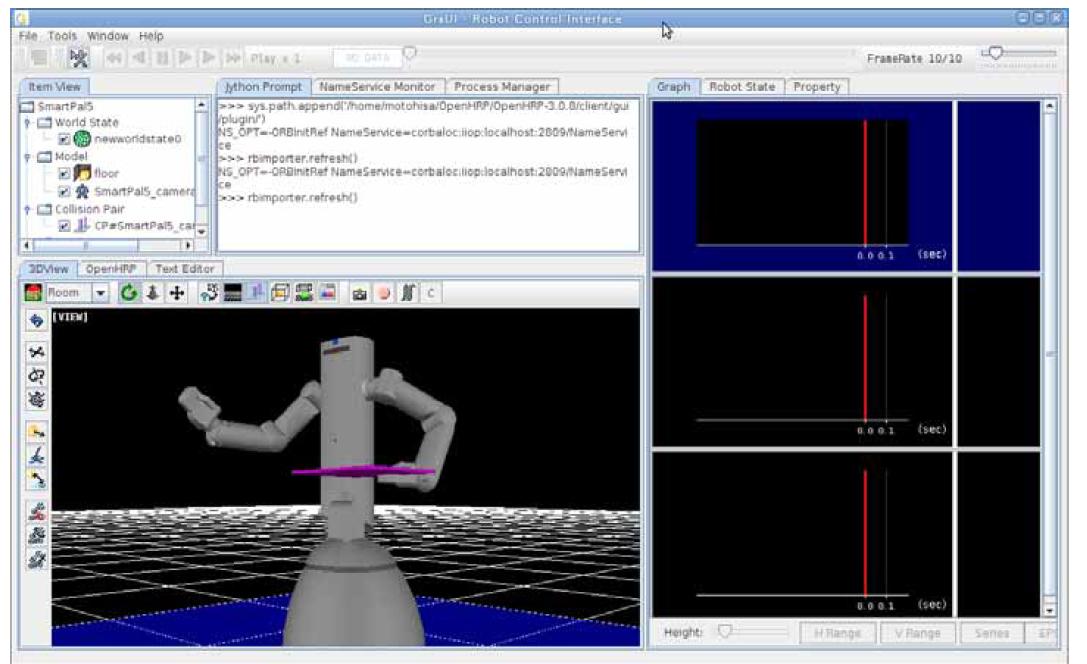
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

歩行時特徴抽出RTCを用いた人物追従ロボットの追従精度の向上