共通カメラインタフェースに対応したバーコードリーダコンポーネント群です。
下記ライブラリを使用しています。 ●OpenCV 2.x (※) ●ARToolKitPlus-2.1.5 ※OpenCV-2.2はARToolKitPlus?-2.1.5と干渉するので使えません。
OpenRTM-aist-1.0 のライセンスに準じます。
独立行政法人 産業技術総合研究所 知能システム研究部門 サービスロボティクス研究グループ 〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二 Tel/Fax:029-861-3427/029-862-3493 email: srrg@m.aist.go.jp
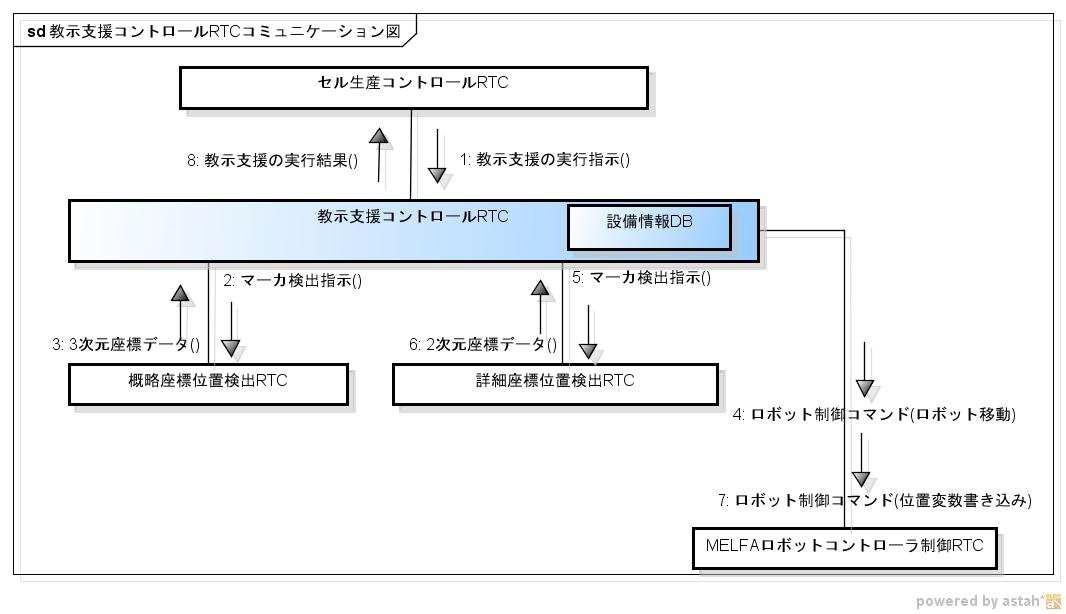
このコンポーネントは、データポートより、部品トレイ上のマーカ座標を読み込んで、そのマーカ座標と設備情報から、各部品の座標を算出して、その座標をロボットコントローラのロボット位置変数へ書き込む機能を有する。
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
富士重工業株式会社 エコテクノロジーカンパニー クリーンロボットプロジェクト AdachiY@utu.subaru-fhi.co.jp 〒320-8564 宇都宮市陽南1-1- 11
Kinova社のロボットアームJACOを制御するためのインターフェース。
・Windowsの.NETフレームワーク4以上でのみ動作します。 ・上記のミドルウェア環境のみで動作します。 ・本モジュールの使用にはJACOの制御ライブラリ(ライセンス付)が別途必要です。
修正BSDライセンスを適用しています。
来訪者の入館・退館における受付業務を主としたオフィスサービスを行うもの とする。 このシステムで行われるサービス内容は、表.サービス一覧に示すサービスに 分割されており各サービス毎及び、サービス連動での動作を可能とする。
【サービス 一覧】
来訪者の入館・退館における受付業務を主としたオフィスサービスを行うもの とする。 このシステムで行われるサービス内容は、表「サービス一覧」に示すサービス に分割されており各サービス毎、及びサービス連動での動作を可能とする。
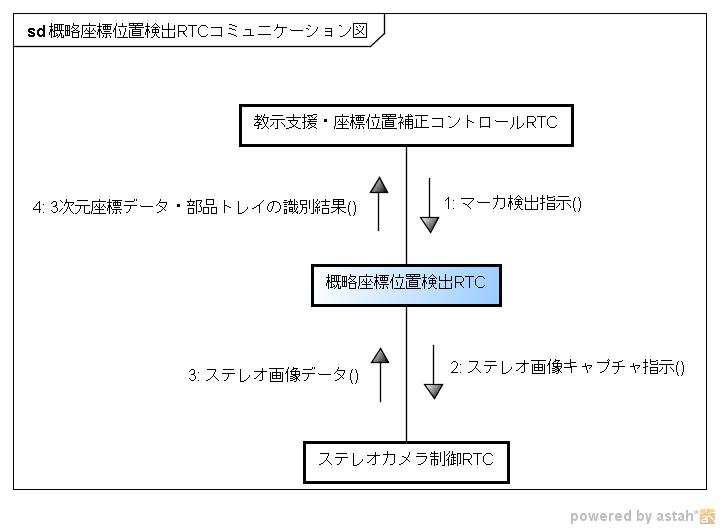
このコンポーネントは、ステレオ画像上より、マーカの座標を検出してマーカ配置パターンを識別する。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

打ち上がれ!オレの花火!~インスタラクティブ花火第1回つくば花火大会~
概要
特徴
仕様
コンポーネント群
新規作成