障害物情報を用いて障害物回避を行うシンプルなコンポーネント群です。
- ObstacleAvoidance 障害物回避RTC (OpenRTM-aist 1.0.0-RC1 C++)
注意事項) ・測域センサ用障害物検知RTCの利用には人追従機能RTCモジュール群中のUrg Comp が必要です。 ・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
BSDライセンス
BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
(特)国際レスキューシステム研究機構 fujinaga@rescuesystem.org 〒653-0042 神戸市長田区二葉町7-1-18地域人材支援センター1階 Tel:078-641-2840 Fax:078-641-2841
奈良先端科学技術大学院大学 情報科学研究科 j-taka@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5371, Fax: 0743-72-5379
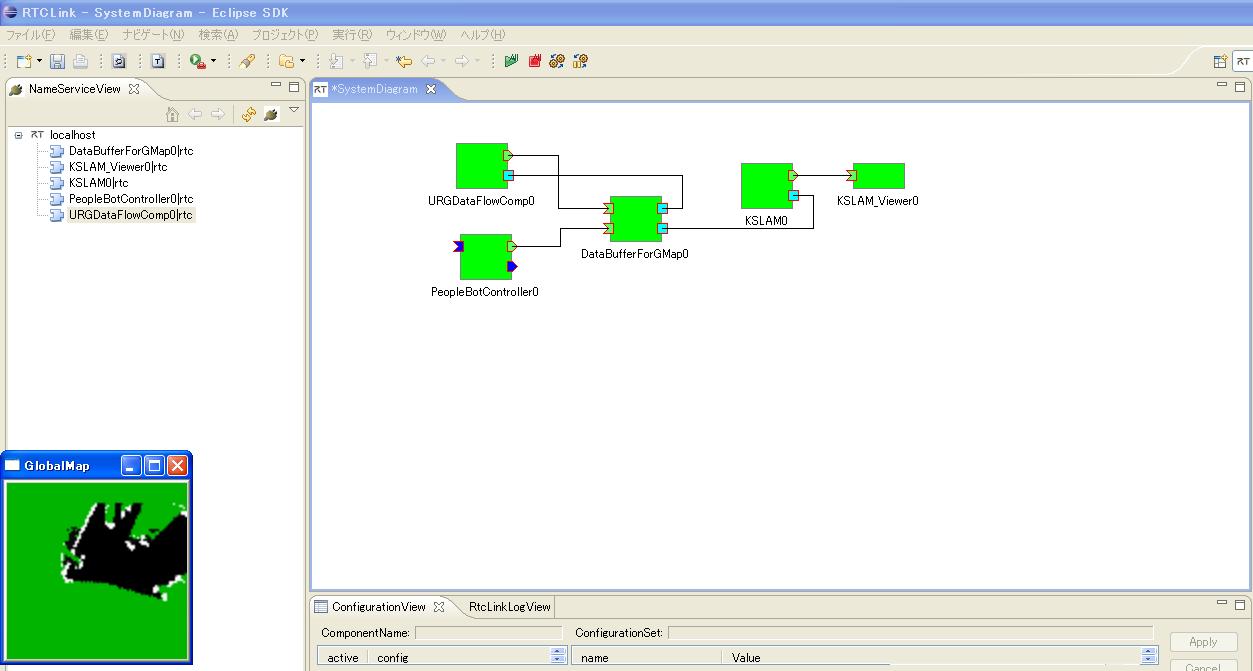
このコンポーネントは、独自手法の大域地図の生成・表示を行うコンポーネント群です。
下記ライブラリを使用しています。 ●OpenRTM1.0.0用では、OpenCV 2.1 ●OpenRTM0.4.x用では、OpenCV 1.0
修正BSDライセンスを適用しています。
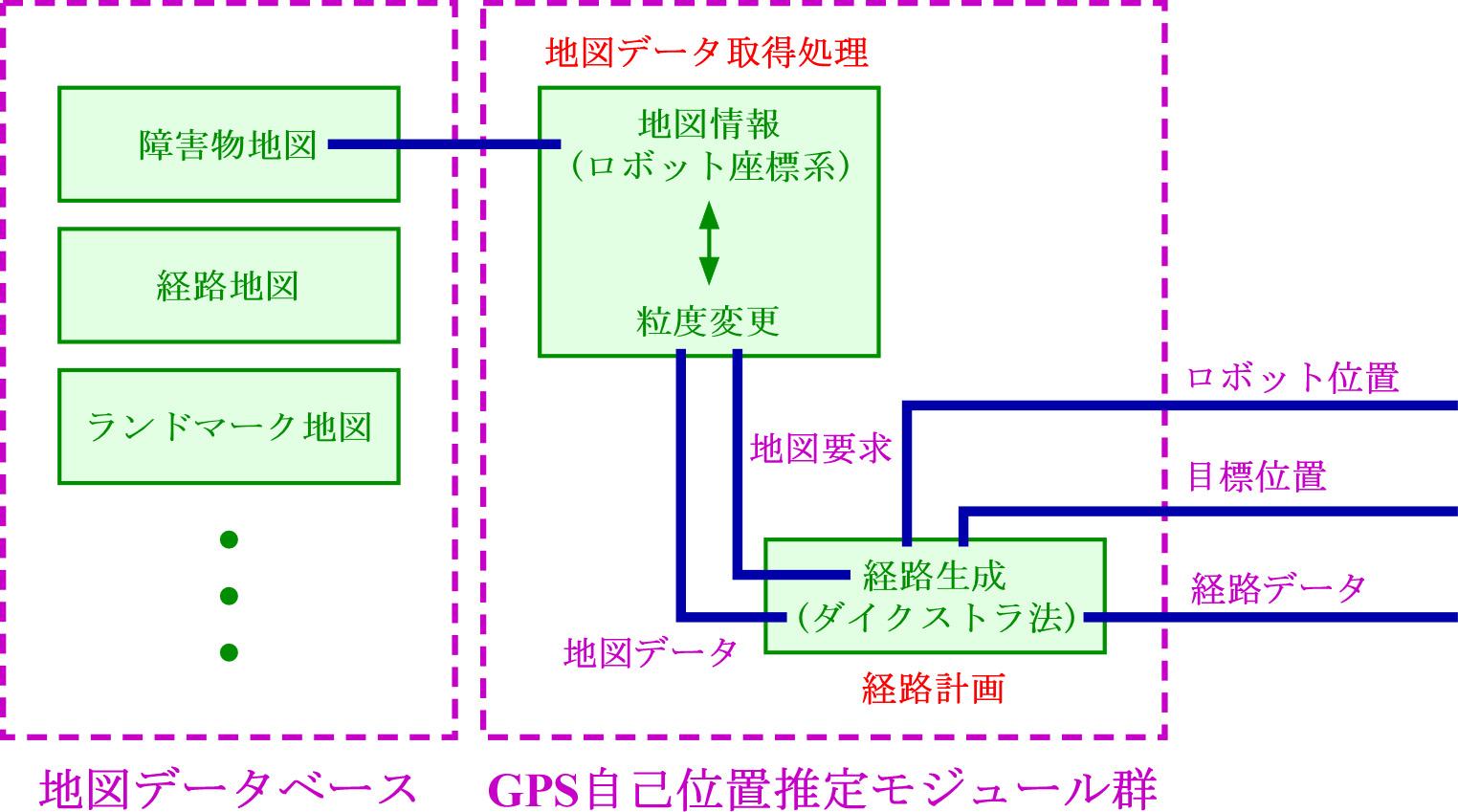
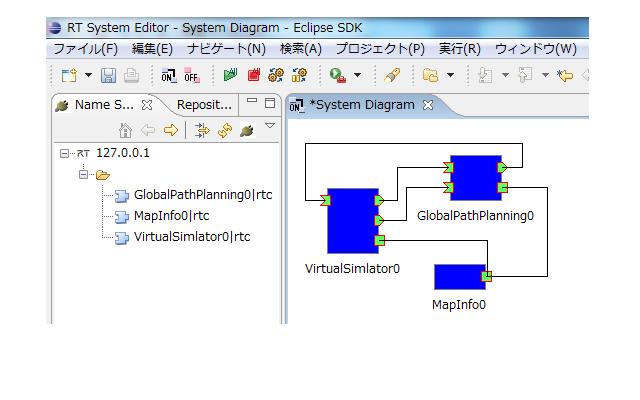
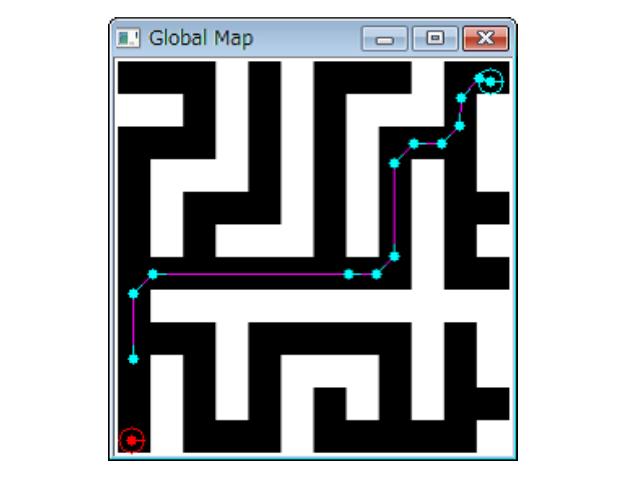
大域的経路計画モジュールは、障害物を回避しながら指定地点への大域的な準最適経路を計画する コンポーネントです。 設定されている環境情報から準最適経路を算出し、現在位置から目標地点への中間経路を求めます。 間に壁があるなど複雑な経路であっても、その地点への経路を大域的に探し出し中間経路を出力します。
商用以外の利用の場合、修正BSDライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
大域経路計画RTCは、指定された開始位置から目的地位置へのロボットの 移動経路を計算し出力するコンポーネント群です。 次のコンポーネントにより構成されています。 ・GlobalPathPlanner コンポーネント ・GlobalMapLoader コンポーネント ・GlobalMapViewer コンポーネント ・Dummy2PosesSender コンポーネント ・MessageReceiver コンポーネント
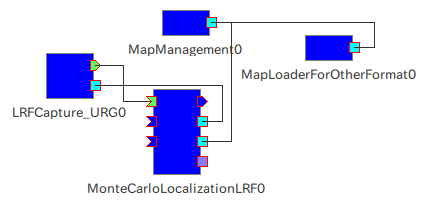
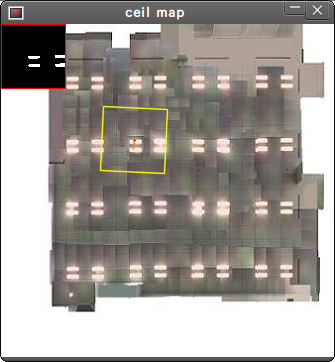
本プログラムはロボットから見える画像と、天井地図のマッチングを常に取ることで自己位置を推定するRTコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 2.0.0
商用以外の利用の場合、BSDライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
奈良先端科学技術大学院大学 情報科学研究科 robotics-staff@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5376, Fax: 0743-72-5379
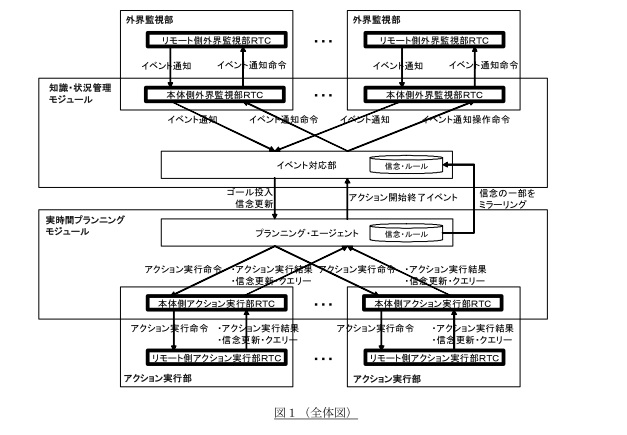
イベントをトリガにしてプラン(=アクションの列)を作成・修正・実行するモジュールです。 イベントを通知する外界監視部と、アクションを実行するアクション実行部を本モジュールに RTM接続して用います。
バイナリーを無償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:hisashi3.hayashi@toshiba.co.jp
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
回避行動モジュール
概要)
障害物情報を用いて障害物回避を行うシンプルなコンポーネント群です。
注意事項)
・測域センサ用障害物検知RTCの利用には人追従機能RTCモジュール群中のUrg Comp が必要です。
・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
ライセンス)
BSDライセンス