北陽電機のURGセンサのRTコンポーネントです.
ビルドしやすいように,プロトコルベースから独自に実装しています. 対応OS : Windows, Linux, MacOSX
URL: https://github.com/sugarsweetrobotics/UrgRTC
gitコマンドを使える場合は非常にシンプルです.
$ git clone https://github.com/sugarsweetrobotics/UrgRTC.git $ git submodule init $ git submodule update $ cd UrgRTC $ mkdir build $ cd build $ cmake ../ $ make
まず,URLの右側のDownload ZIPファイルからダウンロードします.それを展開してもビルドできません.
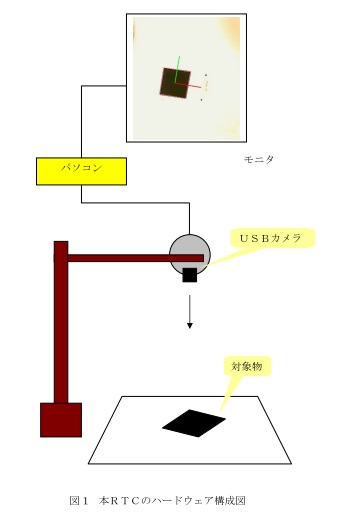
単眼のUSBカメラを使って、多角形マーカの画像を撮影し その位置・姿勢を計測し表示するモジュールである。 マーカとして、四角形、六角形、凸形、凹形を用意した。 位置・姿勢出力は、センス系統一IFに準拠したものであり ロボットアームをコントロールする相対位置決めモジュールと連結できる。 表示には、マーカの実写画像に姿勢ベクトルのCG画を重畳させたり ロボットの手先方向を表示させたりする機能を設けた。
バイナリーを無償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:atsushi.sugahara@toshiba.co.jp
自動化工場における組立ロボットとAGVの連携をイメージしたサービス。 具体的にはAGVが搬送してきた部品を双腕ロボットが認識し, 箱に整理して入れ,それを再びAGVが運び出すサービス。
物体位置姿勢推定RTC HIRO-AGV統合制御モジュール
修正BSDライセンスを適用しています。
ただいま、準備中。しばらくお待ちください。
右手先位置・姿勢6自由度,左手先位置・姿勢6自由度の 合計12自由度を操作することで対象物の位置・姿勢の6自由度, または対象物に与える外力・外モーメントの6自由度, 右手と左手の相対位置・姿勢偏差の6自由度,または対象物に 与える内力・内モーメントの6自由度の合計12自由度を制御可能。 どれを制御するかは選択行列Sで決定。
EPLライセンスを適用しています。
東北大学大学院工学研究科 〒980-8579 仙台市青葉区荒巻字青葉6-6-01 近野 敦 email:konno@space.mech.tohoku.ac.jp
工場での部品搬送をイメージしたサービス。 片手では搬送できないような重量物を両手で協調しながら搬送する。
双腕協調制御RTC
2台の中レベルコンポーネントの干渉回避を行う。 現在のバージョンでは共通作業領域の利用許可フラグを用いて 一台のみ進入を許している。
修正BSDライセンスを適用しています.
3月上旬頃公開予定
筑波大学 大学院システム情報工学研究科 aiyama@esys.tsukuba.ac.jp 〒305-8573 茨城県つくば市天王台1-1-1 Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として 開発されたことを記し、ここに感謝の意を表する。
複数のデータベースでコンポーネントを管理する、階層型ソフトウェアアーキテクチャで使用されるデータベースノードコンポーネント(DNC)を構築。 DNCによる一括管理でもタスクシーケンスを簡単に変更できる。
Qtの公開条件およびRTミドルウェアの公開条件に準ずる。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

北陽電機 URGセンサRTC
北陽電機のURGセンサのRTコンポーネントです.
ビルドしやすいように,プロトコルベースから独自に実装しています.
対応OS : Windows, Linux, MacOSX
ダウンロード
URL: https://github.com/sugarsweetrobotics/UrgRTC
ビルド方法
gitからコマンドラインで (OSX, Linuxでおすすめ)
gitコマンドを使える場合は非常にシンプルです.
Dowlaod Zipからソースコードをダウンロード(Windows?)
まず,URLの右側のDownload ZIPファイルからダウンロードします.それを展開してもビルドできません.