

Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
車輪型移動ロボットのための総合開発環境(群)
概要
車輪型移動ロボットの開発時に必要な総合開発環境のRTコンポーネント群。移動ロボットを始めて学習・開発を行う人を対象とし、シミュレータにより機器を導入する前から学習を始めることができ、人とのコミュニケーションロボットにおける移動制御モデルの開発を行うことができる。
特徴
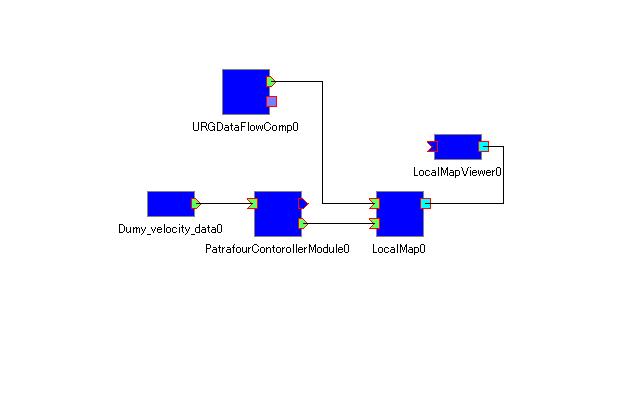
インターフェース
右図のようにコンポーネント間で必要なデータの入出力を行う。具体的には、制御車輪速度、移動ロボットの推定位置・LRFデータ・人物位置・ポテンシャル法における制御ベクトルなど。
ライセンス(公開条件)
MOBILE ROBOTIS社のAriaライブラリを除き、非商用利用であれば自由に利用可能。