
Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
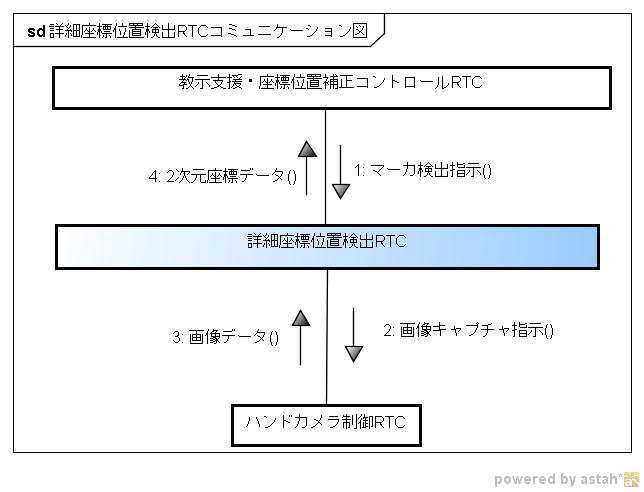
触覚認識モジュール
概要
触覚認識モジュールは、変位センサを装備したロボットハンドで
物体(スプーン、缶など)の部分的な形状を測定し、予め登録した
形状データと照合し、その物体の重心位置・姿勢を算出するもの
である。
ライセンス
バイナリー提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。
連絡先
株式会社 東芝
研究開発センター 機械・システムラボラトリー
〒212-8582 川崎市幸区小向東芝町1
Tel :044-549-2193
Email:atsushi.sugahara@toshiba.co.jp
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。