
Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
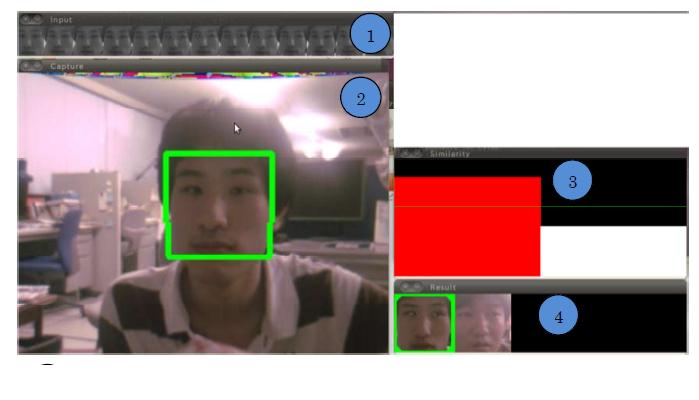
顔動作推定モジュール
概要
顔動作推定コンポーネントは入力された動画(連続した静止画)から
人物の顔を検出し、顔の向き、視線、目口開閉度を出力します。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しくは、下記までご連絡をお願い致します。
連絡先
株式会社イーガー
新規事業開発部 次世代ロボット知能化プロジェクト(担当:窪田)
〒530-0047
大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F
Tel : 06-6360-2050
Fax : 06-6360-2051
E-mail: kubota@mail.eager.co.jp