
Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
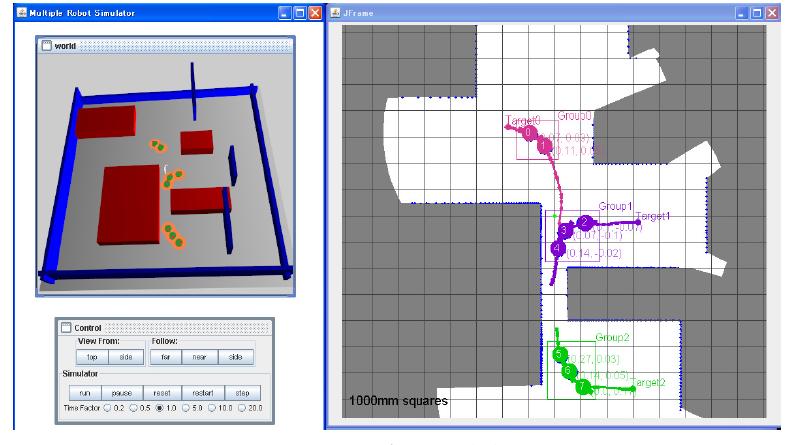
自己位置推定RTC群
概要
レイアウト地図とランドマーク地図を利用した自己位置推定モジュール群です。
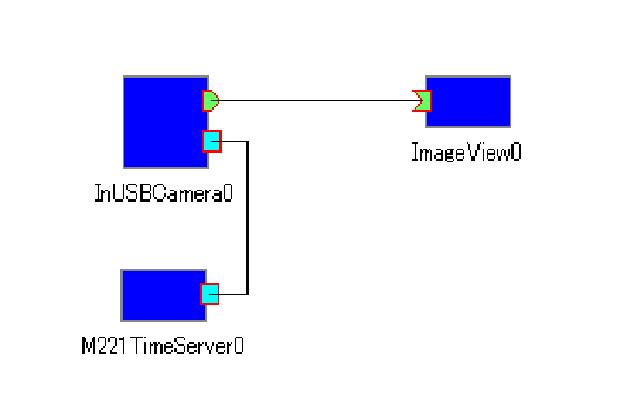
富士通九州ネットワークテクノロジーズより販売している
「ステレオビジョンモジュール」とWindows PCが必要です。
ライセンス
ステレオビジョンモジュール購入者に無償提供致します。 下記URLのステレオビジョンモジュール ソフトウェア提供依頼フォームよりご依頼ください。