

Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
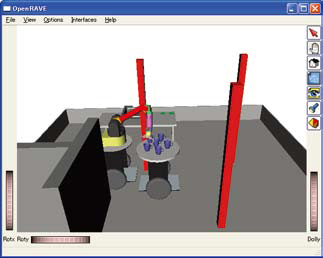
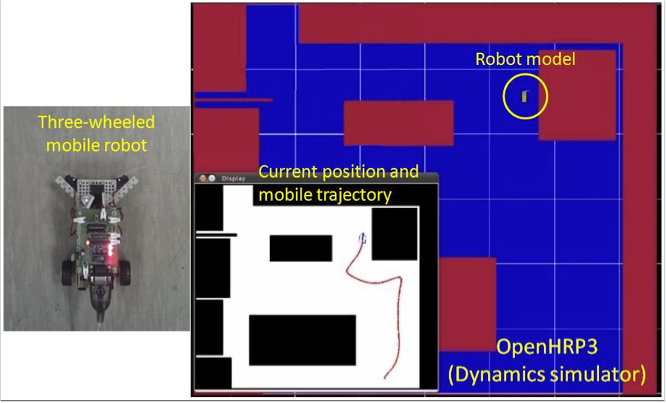
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
PA10アーム分解運動速度制御RTC群
概要
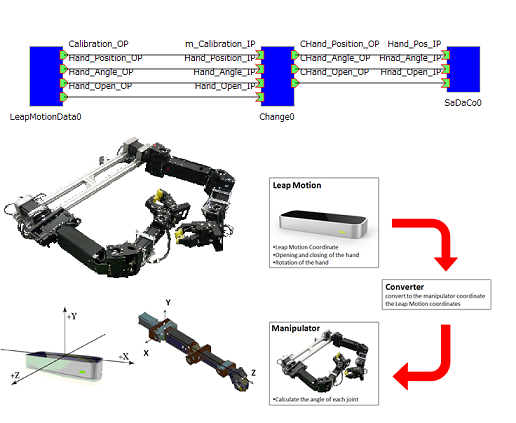
三菱重工業製汎用ロボットPA10用の分解運動速度制御動作(手先座標動作指令)を実現するRTC 群です。
アームベース座標系内での手先位置を与えて制御することが可能であり、
アームの構造に合わせた順運動学RTCとヤコビ行列を解くRTCなどにより
構成される。汎用的なセンサーベースの作業システムで用いることを想定し、
ビジュアルサーボ力覚制御の導入など、機能拡張が可能である。
注意点
Windows版は、下記ライブラリを使用しています。●VPython(シミュレータ動作環境)、三菱重工業製PAライブラリ(実機動作環境)
Ubuntu版については、
●本モジュールでは実機動作環境は用意していません。
●依存ライブラリとして、VPython(シミュレータ動作環境)を使用しています。
ライセンス
商用以外の利用の場合、修正BSDライセンスが適用されます。