RT-Component
遅くなりましたが全コンテンツが揃いました.
コミュニケーション用RTCとセンサRTC,Kobuki改良用RTCを提供します.
Android端末を利用し,多言語の音声発話と音声認識機能を利用できます.
Webコンテンツに設置しているソーシャルネットワークサービス(SNS)のボタンの新しい反応を提示するデバイスの開発を行った。コンテンツの反応の取得には各サービスによって方法が異なっており、仕様変更により様々な反応の取得方法が提案されている。 それに伴い、RTミドルウエアを用いて効率的にデバイスを開発を行った。
SLAMアルゴリズムを検証する際、実世界で行うのが望ましいが、なんども環境を作り直して実験するのは非常に煩雑である。 また、前の環境に戻戻すことが難しいなどの問題がある。
本コンポーネント群は,複数のRTSをステートマシンで管理し,任意のイベントをトリガーとしてRTSの動的変更機能を実装したコンポーネント群です. 例えば,動作する環境(部屋など)をまたいでロボットが動作する場合,その環境に合わせてRTSを変更することが可能です。
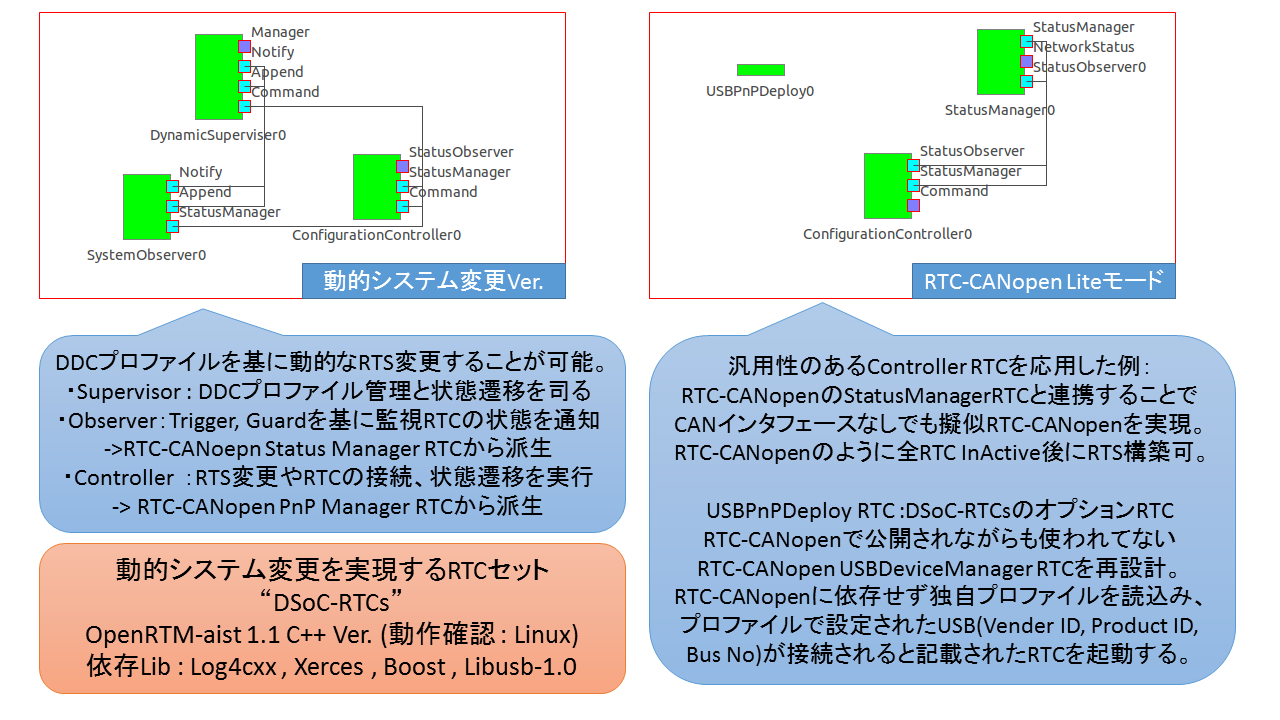
・動的システム変更では、DDCプロファイルを読み込み、特定のイベントが発生すると予め決めておいた別のStateへ遷移しRTSを動的に変更することが可能です。現状では、利用するRTCはすべて起動済みの状態のみのサポートです。RTCの動的起動は今後のサポートになります。 ・RTC-CANopen Liteモードでは、従来のCANインターフェースを接続しなくては使用できなかったRTC-RANopenシステムを、CANインターフェースなしで利用できるようにRTC-CANopen依存を排除したRTCです。動的システム変更で用いているController RTCのコンフィグを変更し、RTC-CANopen StatusManagerRTCと連携することで実現しています。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク




屋内サービスロボット用RTC群
遅くなりましたが全コンテンツが揃いました.
概要
屋内サービスロボット用のRTC群を提供します.各RTCの使用方法やライセンスはGitHubのページをごらんください.
全てのRTCはWindowsとLinuxで動作しますので,OSを選ばず使用できます(注意:Android Conversation RTCは除く).
屋内サービスロボット用RTC群
コミュニケーション用RTCとセンサRTC,Kobuki改良用RTCを提供します.
Android Conversation RTC
Android端末を利用し,多言語の音声発話と音声認識機能を利用できます.