このコンポーネントは、データポートより、部品トレイ上のマーカ座標を読み込んで、そのマーカ座標と設備情報から、各部品の座標を算出して、その座標をロボットコントローラのロボット位置変数へ書き込む機能を有する。
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
(特)国際レスキューシステム研究機構 fujinaga@rescuesystem.org 〒653-0042 神戸市長田区二葉町7-1-18地域人材支援センター1階 Tel:078-641-2840 Fax:078-641-2841
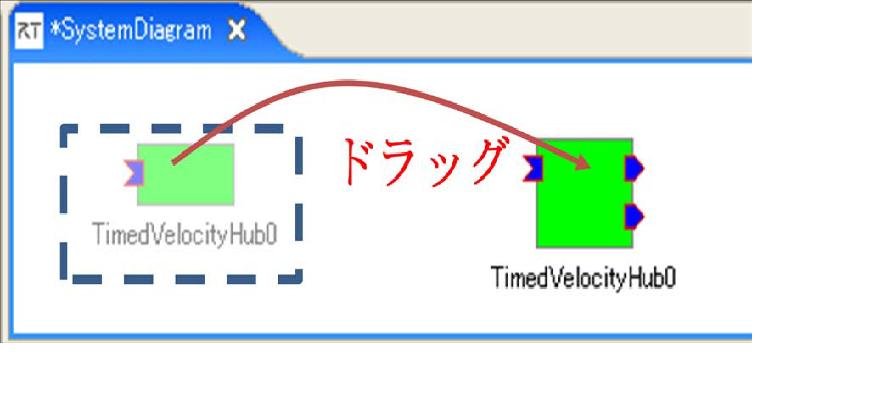
このコンポーネントはTimed Velocity データを複数に分岐するコンポー ネントです。
修正BSDライセンスを適用しています。
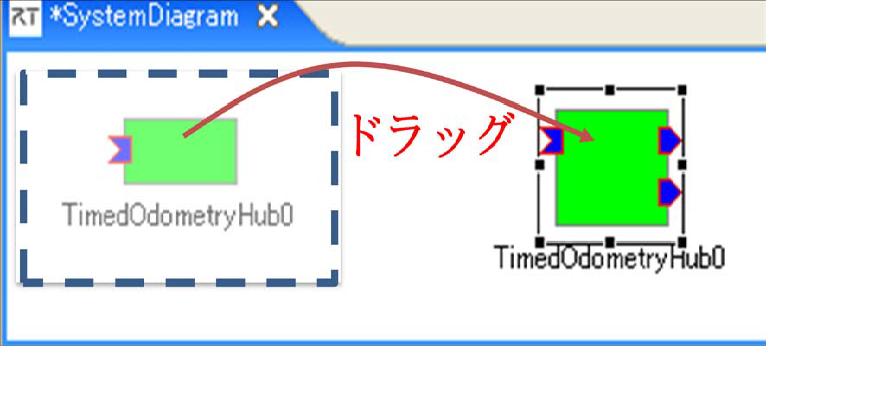
このコンポーネントはTimed Odometry データを複数に分岐するコンポー ネントです。
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
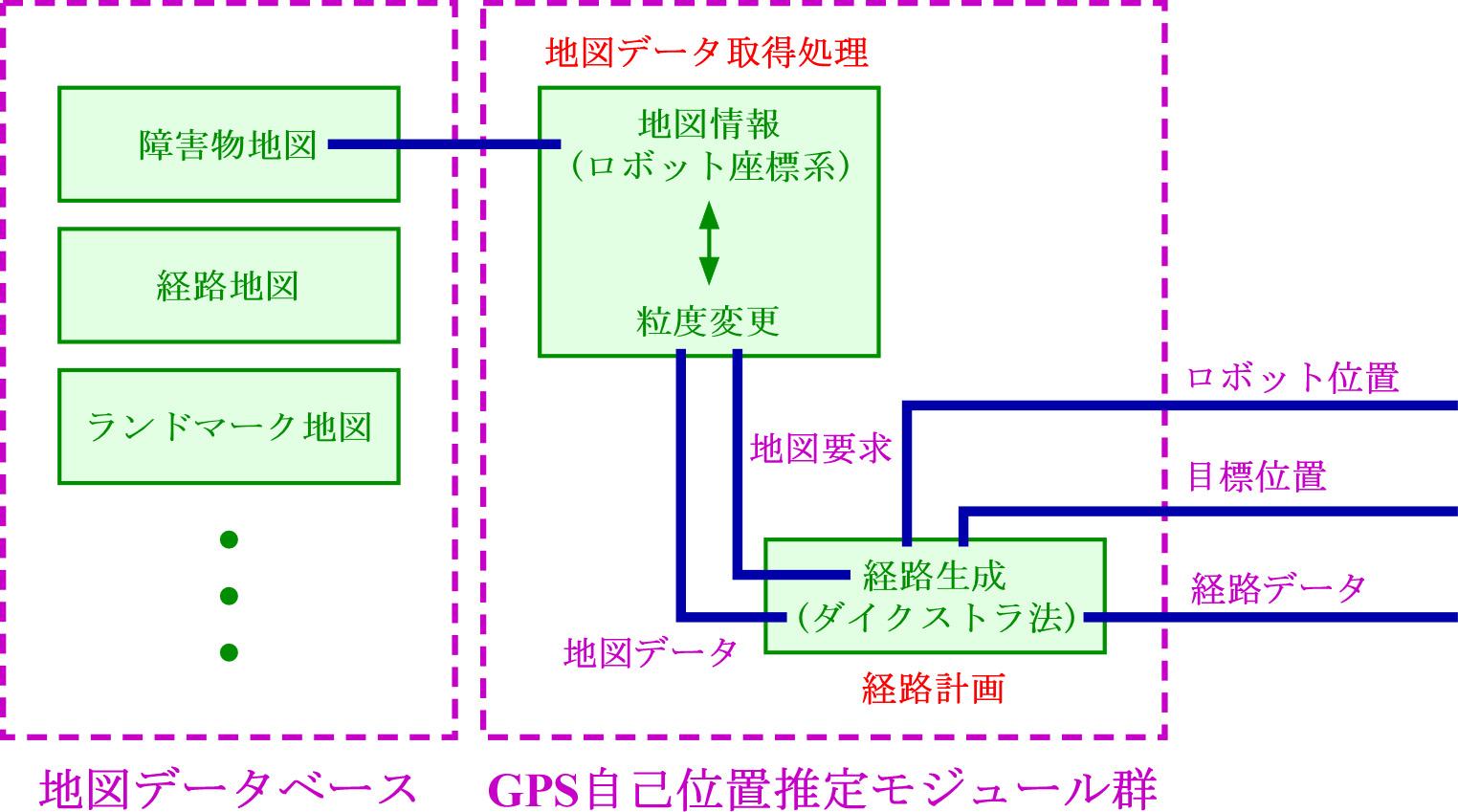
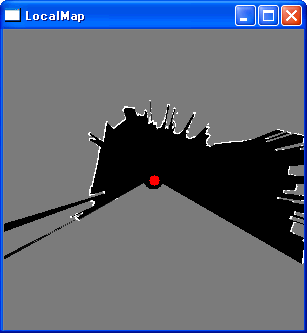
このコンポーネントは距離データとロボットの移動量よりロボット周囲の 障害物存在確率マップを作成するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0
様々な入力データに対し、必要に応じた処理を行うことが可能な汎用演算コンポーネント
OpenRTM-aist において定義されるあらゆるデータ型に接続することができるコンポーネントを実現するための基底クラスをオープンスースで公開します。
オープンソース版作業対象認識モジュール群に付加して使用するツールです。 認識結果の座標系を変換するために利用します。
オープンソース版作業対象認識モジュール群「OpenVGR」 ステレオカメラを利用し、指定された作業対象物の検出結果(3次元位置・姿勢)を 共通形式で出力するモジュール群です。
外界センサの情報から障害物情報を生成するコンポーネントです。
- Urg_to_obstacles 測域センサ用障害物検知RTC (OpenRTM-aist 1.0.0-RC1 C++)
・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
BSDライセンス
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク



教示支援・座標位置補正コントロール
概要
このコンポーネントは、データポートより、部品トレイ上のマーカ座標を読み込んで、そのマーカ座標と設備情報から、各部品の座標を算出して、その座標をロボットコントローラのロボット位置変数へ書き込む機能を有する。
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/