障害物情報から衝突を判定するコンポーネントです。
- CollisionDetection 障害物検知RTC (OpenRTM-aist 1.0.0-RC1 C++)
・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
BSDライセンス
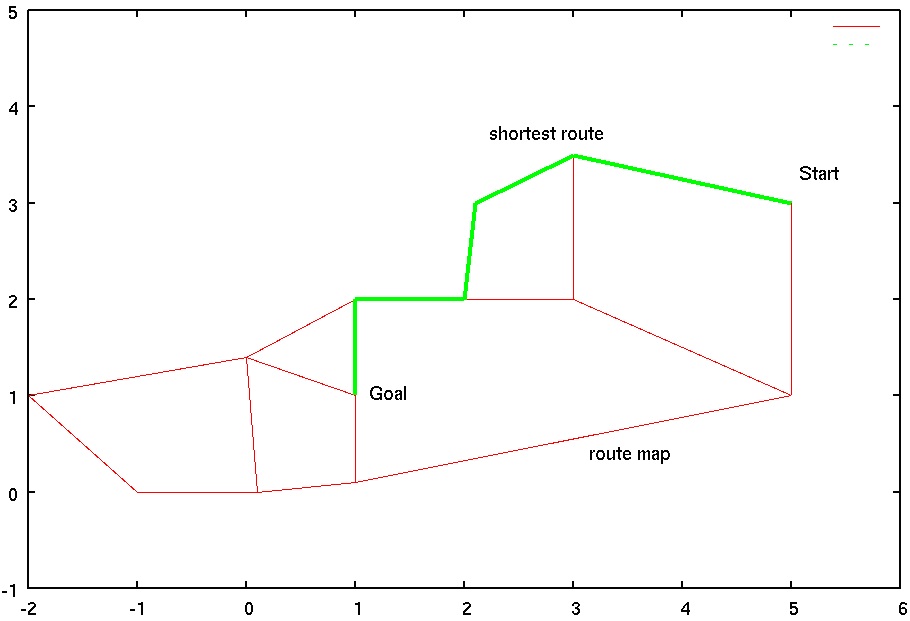
経路地図を用い、現在位置から目標位置までの 最短経路を計算・出力するコンポーネントです。
- PathPlanning 経路計画RTC - PositionInput 目的地入力RTC(デバッグ用) (OpenRTM-aist 1.0.0-RC1 C++)
※インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
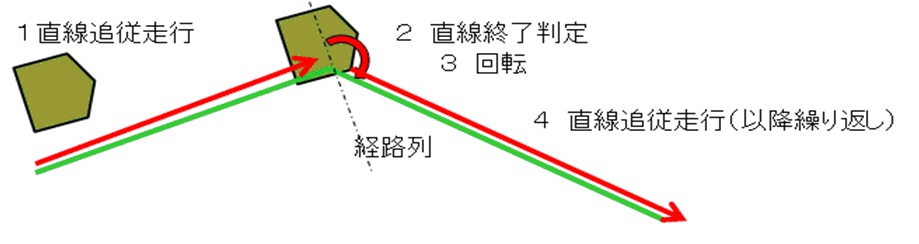
目標経路を追従し経路目的地まで移動するための車体速度情報を出力する自律移動コンポーネントです。
- Navigation 経路走行RTC - PathFollowing 経路追従RTC (OpenRTM-aist 1.0.0-RC1 C++)
BSDライセンス。
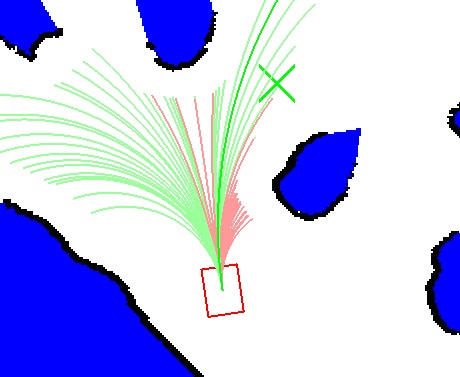
障害物情報を用いて障害物回避を行うシンプルなコンポーネント群です。
- ObstacleAvoidance 障害物回避RTC (OpenRTM-aist 1.0.0-RC1 C++)
注意事項) ・測域センサ用障害物検知RTCの利用には人追従機能RTCモジュール群中のUrg Comp が必要です。 ・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
衝突判定モジュール
概要)
障害物情報から衝突を判定するコンポーネントです。
注意事項)
・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
ライセンス)
BSDライセンス